



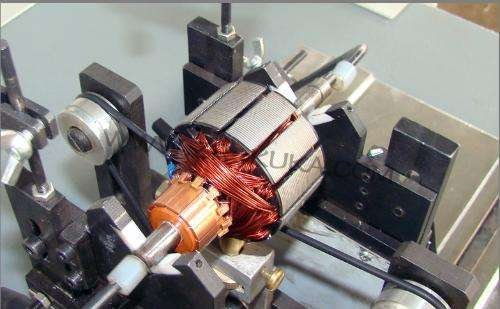
工业机器人伺服电机转子的不平衡电机振荡因素:
1·制造时的残留不平衡。
2·工业机器人伺服电机长时间间工作产生尘埃的多量附着。
3·工作时热应力导致轴曲折。
4·工业机器人伺服电机转子配件的热位移导致不平衡载重。
5·转子配件的离心力导致变形或偏疼。
6·外力(皮带、齿轮、直结不良等)导致轴曲折。
7·工业机器人伺服电机轴承的设备不良(轴的精度或锁紧)导致轴曲折或轴承的内部变形。
工业机器人伺服电机转子的不平衡电机振荡对策:
1·按捺转子不平衡量。
2·保护到容许不平衡量以内。
3·工业机器人伺服电机轴与铁心过度紧配的改进。
4·对热膨胀的异方性,规划改进。
5·强度规划或装配的改进。
6·轴强度规划的批改,轴联合器的品种改变以及直结对基地的批改。
7·轴承端面与轴附段部或锁紧螺帽的避免偏靠。
8·强度设计或装配的改善。
9·轴强度设计的修正,轴联结器的种类变更以及直结对中心的修正。
10·轴承端面与轴附段部或锁紧螺帽的防止偏靠。