



二、库卡机器人外部启动cell程序修改和程序
1、外部启动cell.src主程序新建模板
DEF Cell ( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
CHECK HOME
PTP HOME Vel= 100 % DEFAULT
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; Select with Programnumber
CASE 1
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
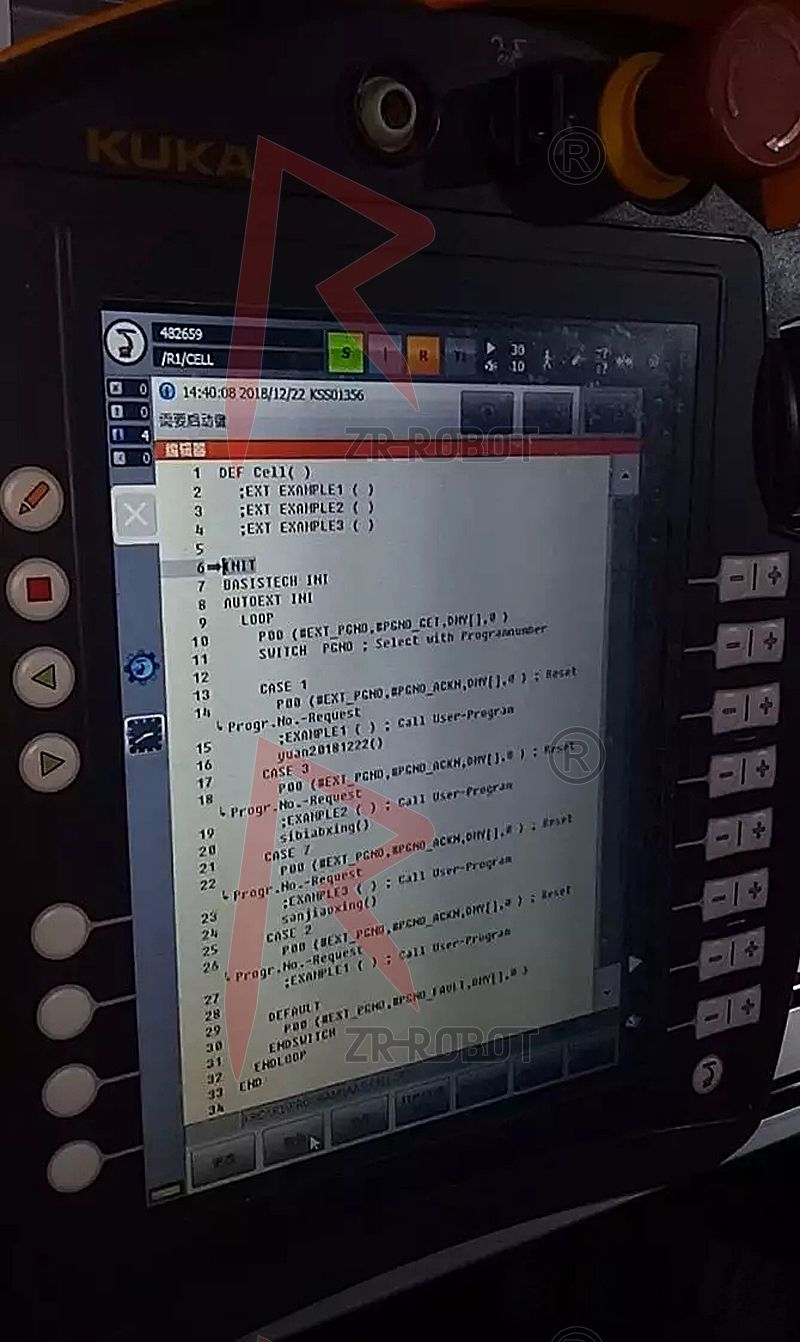
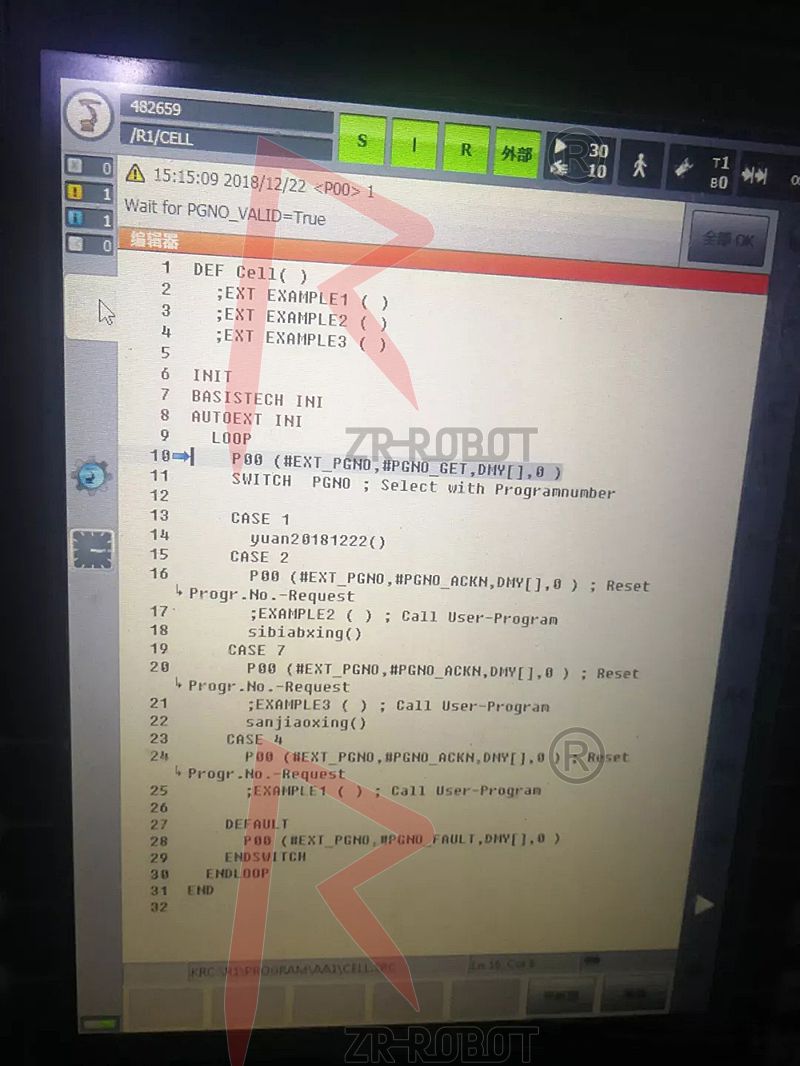
2、外部启动cell.src主程序修改后
DEF Cell( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; Select with Programnumber
CASE 1
yuan20181222()
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
sibiabxing()
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
sanjiaoxing()
CASE 4
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
3、各个其他子程序
(1)yuan20181222() 全局子程序圆
DEF yuan20181222( )
INI
PTP P6 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P1 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
CIRC P2 P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
CIRC P4 p1 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
PTP p6 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
(2)sibiabxing() 全局子程序四边形
DEF SIBIABXING( )
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P5 Vel=1 m/s CPDAT5 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
PTP P1 Vel=100 % PDAT3 Tool[1]:TOOL1 Base[0]
END
(3)sanjiaoxing() 全局子程序三角形
DEF SANJIAOXING( )
DECL INT C
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
FOR C=1 TO 3
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
ENDFOR
PTP P1 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
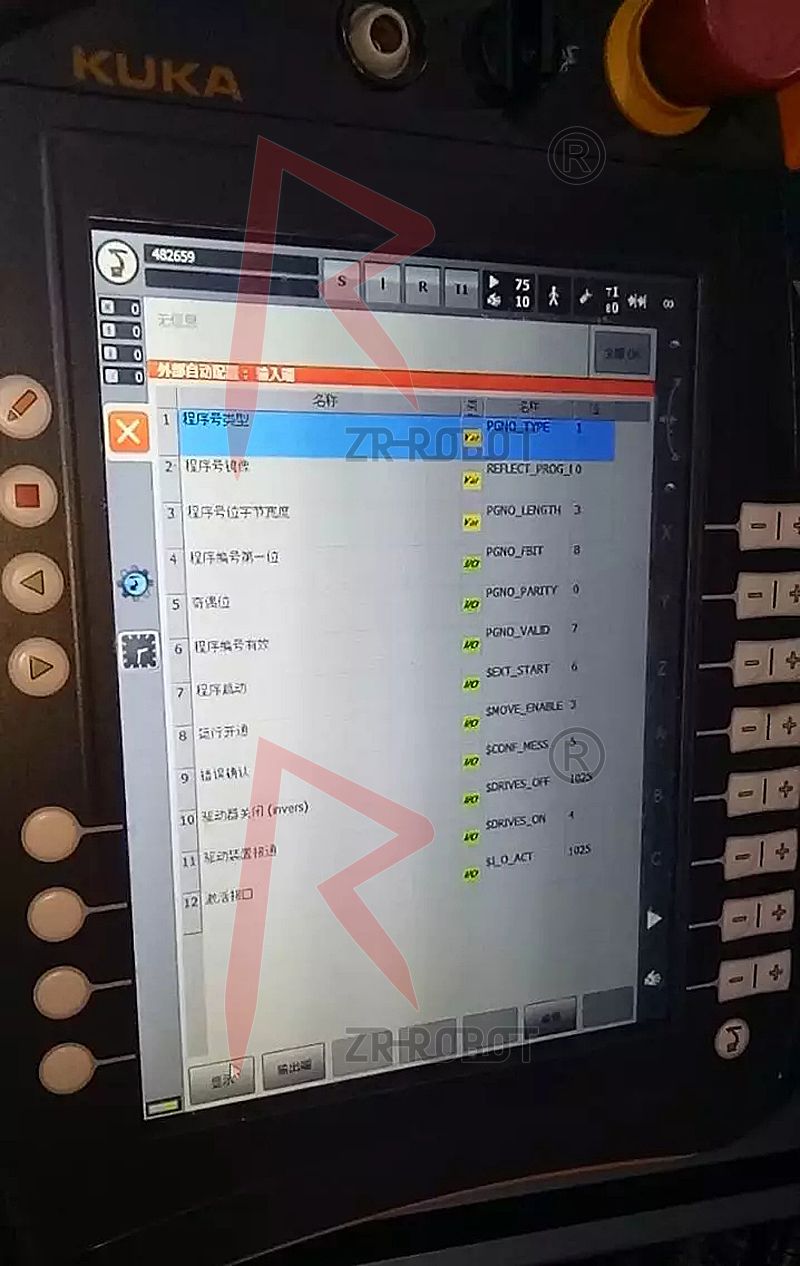
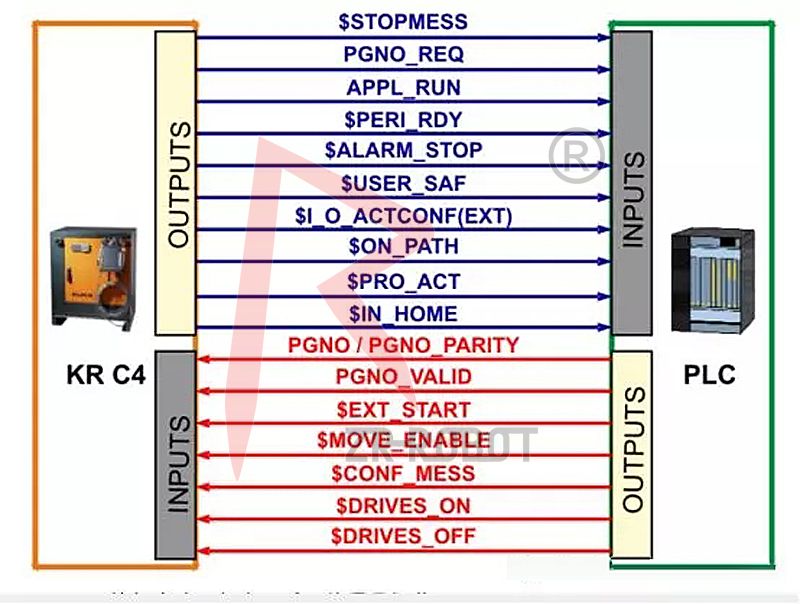
三、外部启动各项IO配置说明
|
序号 |
输入 参数 |
参数描述 |
|
1 |
PGNO_TYPE |
此变量确定了以何种格式来读取上级控制系统传送的程序编号。 为1值时:以二进制数值读取:上级控制系统以二进制编码整数值的形式传递程序编号。例如:0 0 1 0 0 1 1 1=> PGNO = 39 为2值时:以 BCD 值读取。上级控制系统以二进制编码小数值的形式传递程序编号。例如:0 0 1 0 0 1 1 1=> PGNO = 27 为3值时:以 “N 选 1” 的形式读取 ,上级控制系统或外围设备以 “N 选 1” 的编码值传递程序编号。0 0 0 0 0 0 0 1=> PGNO = 1和0 0 0 0 1 0 0 0=> PGNO = 4 |
|
2 |
PGNO_LENGTH |
程序号长度:此变量确定了上级控制系统传送的程序编号的位宽。 值域: 1 … 16。若 PGNO_TYPE 的值为 2,则只允许位宽为 4、8、12 和 16。 |
|
3 |
PGNO_PARITY |
程序号的奇偶位: 负值:为奇校验,只读取奇数; 0:无分析,奇数和偶数都识别; 正数:为偶校验,只读取偶数 如果 PGNO_TYPE 值为 3,则 PGNO_PARITY 不被分析。 |
|
4 |
PGNO_VALID |
程序号有效:上级控制系统传送读取程序号指令的输入端 负值:在信号的脉冲下降沿应用编号 0:在线路 EXT_START 处随着信号的脉冲上升沿应用编号。 正值:在信号的脉冲上升沿应用编号。 |
|
5 |
$EXT_START |
外部启动:设定了该输入端后,输入 / 输出接口激活时将启动或继续一个程序 (一般为 CELL.SRC)。仅分析信号的脉冲上升沿。在外部自动运行中无 BCO 运行。 这表明,机器人在启动之后以编程设定的速度 (没有减速)到达第一个编程设定的位置,并且不停在那里。 |
|
6 |
$MOVE_ENABLE |
允许运行:该输入端用于由上级控制器对机器人驱动器进行检查。 TRUE :可手动运行和执行程序 FALSE :停住所有驱动装置并锁定所有激活的指令 当驱动装置由上级控制器停住后,将显示 “ 开通全部运行 ” 的信息提示。 删除了该信息提示并且重新发出外部启动信号后机器人才能重新运动。投入运行时变量 $MOVE_ENABLE 常常设计为值 $IN[1025]。 如果此后忘记设计另一个输入端,则不能外部启动。 |
|
7 |
$CONF_MESS |
确认信息提示(错误复位):通过给该输入端赋值,当故障原因排除后,上级控制器将自己确认故障信息,上升沿有效。 |
|
8 |
$DRIVES_ON |
驱动装置接通:如果在此输入端上施加了持续至少 20 毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。 |
|
9 |
$DRIVES_OFF |
驱动装置关闭:如果在此输入端上施加了持续至少 20 毫秒的低脉冲,则上级控制系统会关断机器人驱动装置。 |
(2)机器人输出端信号参数含义
|
序号 |
输出 参数 |
参数描述 |
|
1 |
$ALARM_STOP |
紧急停止:出现紧急停止时可从输出端 $ALARM_STOP 和 Int. NotAus 的状态看出是哪种紧急停止:两个输出端均为 FALSE: 触发了库卡控制面板 (KCP)上的紧急停止按键$ALARM_STOP FALSE, Int. NotAus TRUE: 外部紧急停止 该输出端将在出现以下紧急停止情形时复位: 1)按下了库卡控制面板 (KCP)上的紧急停止按键。(内部紧急关断) 2)外部紧急停止 |
|
2 |
$USER_SAF |
操作人员防护装置 / 防护门:该输出端在打开护栏询问开关 (运行方式 AUT)或放开确认开关 (运行方式 T1 或 T2)时复位。 |
|
3 |
$PERI_RDY |
驱动装置处于待机状态:通过设定此输出端机器人控制系统通知上级控制系统机器人驱动装置已接通。 |
|
4 |
$STOPMESS |
停止信息:该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求停住机器人的信息提示。 (例如: 紧急停止按键、运行开通或操作人员防护装置) |
|
5 |
$I_O_ACTCONF |
外部自动运行激活:选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE(一般始终设为 $IN[1025])后,输出端为 TRUE。 |
|
6 |
$PRO_ACT |
程序激活 / 正在运行:当一个机器人层面上的过程激活时,始终给该输出端赋值。 在处理一个程序或中断时,过程为激活状态。 程序结束时的程序处理只有在所有脉冲输出端和触发器均处理完毕之后才视为未激活。 |
|
7 |
PGNO_REQ |
程序号问询:在该输出端信号变化时,要求上级控制器传送一个程序号。如果 PGNO_TYPE 值为 3,则 PGNO_REQ 不被分析。 |
|
8 |
APPL_RUN |
应用程序在运行中:机器人控制系统通过设置此输出端来通知上级控制系统机器人正在处理有关程序。 |
|
9 |
$IN_HOME |
机器人位于起始位置 (HOME):该输出端通知上级控制器机器人正位于其起始位置 (HOME)。 |
|
10 |
$ON_PATH |
机器人位于轨迹上:只要机器人位于编程设定的轨迹上,此输出端即被赋值。 在进行了 BCO运行后输出端 ON_PATH 即被赋值。 输出端保持激活,直到机器人离开了轨迹、程序复位或选择了语句。 但信号 ON_PATH 无公差范围,机器人一离开轨迹,该信号便复位。 |
|
系统输入信号 |
硬件输入信号 |
|
in1-in16 |
di1-di16 |
|
系统输出信号 |
硬件输信号 |
|
out1-out16 |
do1—do16 |