下面讲下如何将一些数据log下来,可以基于机器人本身的CWRITE指令来实现此功能:
(1).Log文件自动以时间命名;
(2).每隔10秒log一次;
(3).每条信息独立一行;
具体实现过程如下:
1.在SmartPad上创建一个xxx.src,如下:
DEF Write_File( )DECL INT handleDECL STATE_T STATDECL MODUS_T MODEDECL CHAR AxisPos[256]DECL CHAR ProState[256]DECL CHAR ErrorID[256]DECL CHAR FILENAME[256]DECL INT OffsetDECL BOOL bokDECL char LF MODE = #SYNCHANDLE = 0OFFSET=0bOK=STRCLEAR(AXISPos[])BOK=STRCLEAR(Prostate[])BOK=STRCLEAR(ERRORID[])LF = 10SWRITE(AxisPos[],STAT,Offset,"%S:%F|%F|%F|%F|%F|%F","Current Axis Position",$AXIS_ACT.A1,$AXIS_ACT.A2,$AXIS_ACT.A3,$AXIS_ACT.A4,$AXIS_ACT.A5,$AXIS_ACT.A6)Offset=0SWITCH $PRO_STATE1 CASE #P_ACTIVE ProState[]="Program State: RobotProgram is selected and running!" CASE #P_FREE ProState[]="Program State: RobotProgram is deselected!" CASE #P_END ProState[]="Program State: RobotProgram is selected and the end of program has been reached!" CASE #P_RESET ProState[]="Program State: RobotProgram is selected and has been stopped and reset!" CASE #P_STOP ProState[]="Program State: RobotProgram is selected and has been stopped!"ENDSWITCHSWRITE(ERRORID[],STAT,offset,"ErrorINFO: ERRORID-%D|LINENR-%D|PROG-%S|SUB-%S",$ERR.NUMBER,$ERR.LINE_NR,$ERR.MODULE[],$ERR.UP_NAME[])offset=0IF STRCLEAR(FILENAME[])THENSWRITE(FILENAME[],STAT,offset,"%D%D%D-%Dh%Dm%Ds.txt",($DATE.year),($DATE.MONTH),($DATE.DAY),($DATE.HOUR),($DATE.MIN),($DATE.SEC))ENDIFWAIT FOR TIMER_LIMIT(10) CWRITE($FCT_CALL,STAT,MODE, "krl_fopen",FILENAME[], "w", HANDLE)CWRITE($FCT_CALL, STAT, MODE, "krl_fputs", HANDLE, AxisPos[])CWRITE($FCT_CALL, STAT, MODE, "krl_fputc", HANDLE, LF) CWRITE($FCT_CALL, STAT, MODE, "krl_fputs", HANDLE, PROSTATE[])CWRITE($FCT_CALL, STAT, MODE, "krl_fputc", HANDLE, LF) CWRITE($FCT_CALL, STAT, MODE, "krl_fputs", HANDLE, ErrorID[])CWRITE($FCT_CALL, STAT, MODE, "krl_fclose", HANDLE)END2.在SPS里调用该程序:
3.确保SPS运行:
4.在机器人控制器路径下C:\KRC\Roboter\Userfiles看生成的log文件: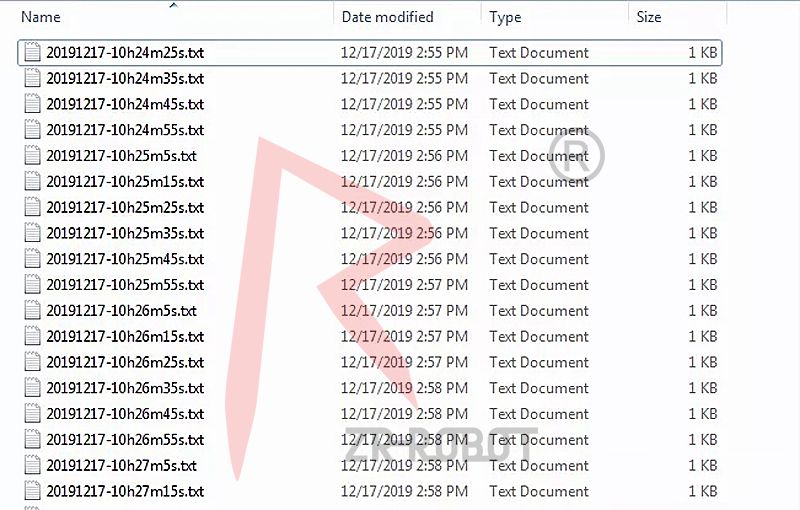
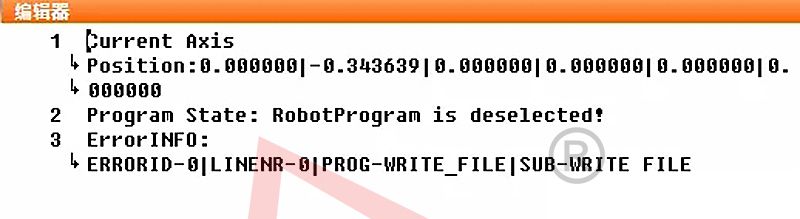
5.查看具体log文件: