



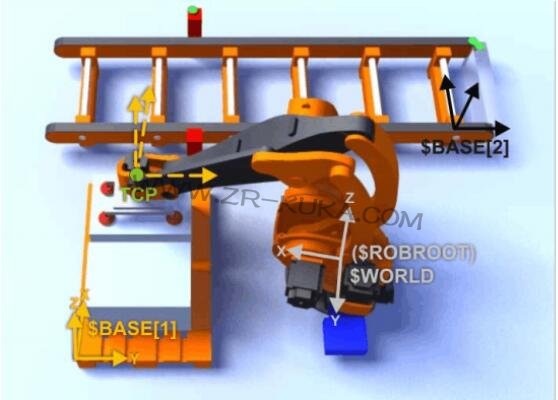
图 2-14: 基坐标系中的手动移动
基坐标系说明
机器人的工具可以根据基坐标系的坐标方向运动。基坐标系可以被单个测量,并可以经常沿工件边缘、工件支座或者货盘调整姿态。由此可以进行舒适的手动移动!
在此过程中, 所有需要的机器人轴也会自行移动。哪些轴会自行移动由系统决定,并因运动情况不同而异。
为此需要使用移动键或者 KUKA smartPAD 的 3D 鼠标。
可供选择的基坐标系有 32 个。
速度可以更改(手动倍率: HOV)
仅在 T1 运行模式下才能手动移动。
确认键必须已经按下。
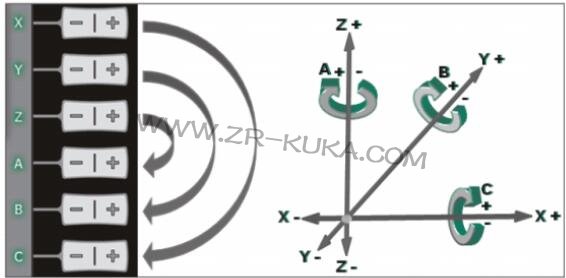
图 2-15: 笛卡尔坐标系
基坐标手动移动原理
图 2-15: 笛卡尔坐标系
在坐标系中可以两种不同的方式移动机器人:
沿坐标系的坐标轴方向平移(直线) : X 、Y、Z
环绕着坐标系的坐标轴方向转动(旋转/ 回转) : 角度 A 、B 和 C 收到一个运行指令时(例如按了移动键后)控制器先计算一行程段。该行程段的起点是工具参照点 (TCP) 。行程段的方向由世界坐标系给定。 控制器控制所有轴相应运动,使工具沿该行程段运动(平动)或绕其旋转(转动) 。
操作步骤
1. 选择基坐标作为移动键的选项。

2. 选择工具坐标和基坐标

3. 设置手动倍率。

4. 将确认开关按至中间挡位并按住。
5. 用移动键沿所需的方向移动。

6. 作为选项,也可用 3D 鼠标来移动。
使用基坐标系的优点:
只要基坐标系已知,机器人的动作始终可预测。
这里也可用3D 鼠标直观操作。前提条件是操作员必须相对机器人以及基坐标系正确站立。
注意
如果还另外设定了工具坐标系,则可在基坐标系中绕 TCP 改变姿态。操作步骤
1. 选择基坐标作为移动键的选项。
2. 选择工具坐标和基坐标
3. 设置手动倍率。
4. 将确认开关按至中间挡位并按住。
5. 用移动键沿所需的方向移动。
6. 作为选项,也可用 3D 鼠标来移动。
停机反应 工业机器人会在操作或在监控和出现故障信息时做出停机反应。下面的表格中列出了停机反应与所设定的运行方式的关系。
| 概念 | 说明 |
| 安全运行停止 |
安全运行停止是一种停机监控。它不停止机器人运动,而是监控机器人
轴是否静止。如果机器人轴在安全运行停止时运动,则安全运行停止触
发安全停止 STOP 0 。
安全运行停止也可由外部触发。
如果安全运行停止被触发,则机器人控制系统会给现场总线的一个输出
端赋值。如果在触发安全运行停止时不是所有的轴都停止,并以此触发
了安全停止 STOP 0 ,则也会给该输出端赋值。
|
| 安全停止 STOP 0 |
一种由安全控制系统触发并执行的停止。安全控制系统立即关断驱动装
置和制动器的供电电源。
提示: 该停止在文件中称作安全停止 0 。
|
| 安全停止 STOP 1 |
一种由安全控制系统触发并监控的停止。该制动过程由机器人控制系统
中与安全无关的部件执行并由安全控制系统监控。一旦机械手静止下来,
安全控制系统就关断驱动装置和制动器的供电电源。
如果安全停止 STOP 1 被触发,则机器人控制系统便给现场总线的一个
输出端赋值。
安全停止 STOP 1 也可由外部触发。
提示: 该停止在文件中称作安全停止 1 。
|
| 安全停止 STOP 2 |
一种由安全控制系统触发并监控的停止。该制动过程由机器人控制系统
中与安全无关的部件执行并由安全控制系统监控。驱动装置保持接通状
态,制动器则保持松开状态。一旦机械手停止下来,安全运行停止即被
触发。
如果安全停止 STOP 2 被触发,则机器人控制系统便给现场总线的一个
输出端赋值。
安全停止 STOP 2 也可由外部触发。
提示: 该停止在文件中称作安全停止 2 。
|
| 停机类别 0 |
驱动装置立即关断,制动器制动。机械手和附加轴 (选项)在额定位置
附近制动。
提示: 此停机类别在文件中被称为 STOP 0 。
|
| 概念 | 说明 |
| 停机类别 1 |
机械手和附加轴(选项)在额定位置上制动。 1 秒钟后驱动装置关断,
制动器制动。
提示: 此停机类别在文件中被称为 STOP 1 。
|
| 停机类别 2 |
驱动装置不被关断,制动器不制动。机械手及附加轴 (选项)通过一个
不偏离额定位置的制动斜坡进行制动。
提示: 此停机类别在文件中被称为 STOP 2 。
|
| 触发因素 | T1,T2 | AUT, AUT EXT |
| 启动键被松开 | STOP 2 | - |
| 按下停机键 | STOP 2 | |
| 驱动装置关机 | STOP 1 | |
| 输入端无“运动许可” | STOP 2 | |
| 关闭机器人控制系统(断电) | STOP 0 | |
|
机器人控制系统内与安全 无关的部件出现内部故障 |
STOP 0 或 STOP 1 (取决于故障原因) |
|
| 运行期间工作模式被切换 | 安全停止 2 | |
|
打开防护门(操作人员防 护装置) |
- | 安全停止 1 |
| 松开确认键 | 安全停止 2 | - |
|
持续按住确认键或出现故 障 |
安全停止 1 | - |
| 按下急停按钮 | 安全停止 1 | |
|
安全控制系统或安全控制 系统外围设备中的故障 |
安全停止 0 | |