
KUKA示教器维修
- 库卡机械手C4示教编程器显示竖线故障维修
- KUKA机械手C4控制系统维修无物理储存报警快速修复
- KUKA工业机器人C4示教器闪屏维修步骤分析
- 库卡机器人示教器00189002无法启动维修知识
- KUKA机器人KCP5手持编程器维修按键失灵故障
技术教程

示教器维修

伺服电机维修

库卡KUKA机器人运行的方式有哪些
日期:2019-09-19 人气: 来源:互联网
简介:KUKA 机器人的运行方式 T1 (手动慢速运行) 用于测试运行、编程和示教 程序执行时的最大速度为 250 mm/s 手动运行时的最大速度为 250 mm/s T2 (手动快速运行) 用于测试运行 程序执行时的速度等于编程设定的速度! 手动运行: 无法进行 AUT (自动运行)……
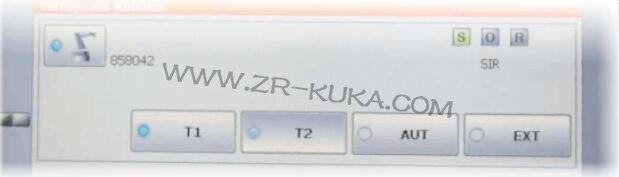
KUKA 机器人的运行方式
| T1 (手动慢速运行) |
用于测试运行、编程和示教
程序执行时的最大速度为 250 mm/s
手动运行时的最大速度为 250 mm/s
|
| T2 (手动快速运行) |
用于测试运行
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
|
| AUT (自动运行) |
用于不带上级控制系统的工业机器人
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
|
| AUT EXT (外部自动运行) |
用于带上级控制系统( PLC)工业机器人
程序执行时的速度等于编程设定的速度!
手动运行: 无法进行
|
运行方式的安全提示
手动运行 T1 和 T2
手动运行用于调试工作。调试工作是指所有为使机器人系统上可进入自动运行模式而必须在其上所执行的工作,其中包括:
示教/ 编程
在点动运行模式下执行程序(测试/ 检验)
对新的或者经过更改的程序必须始终先在手动慢速运行方式(T1) 下进行测试。
在手动慢速运行方式 (T1) 下:
操作人员防护装置(防护门)未激活!
在不必要的情况下,不允许其他人员在防护装置隔离的区域内停留。
如果需要有多个工作人员在防护装置隔离的区域内停留,则必须注意以下事项:
所有人员必须能够不受防碍地看到机器人系统。
必须保证所有人员之间都可以直接看到对方。
操作人员必须选定一个合适的操作位置,使其可以看到危险区域并避开危险。

在手动快速运行方式下 (T2) :
操作人员防护装置(防护门)未激活!
只有在必须以大于手动慢速运行的速度进行测试时,才允许使用此运行方式。
在这种运行模式下不得进行示教。
在测试前,操作人员必须确保确认装置的功能完好。
操作人员的操作位置必须处于危险区域之外。
不允许其他人员在防护装置隔离的区域内停留。
运行方式自动和外部自动
必须配备安全、防护装置,而且它们的功能必须正常。
所有人员应位于由防护装置隔离的区域之外。
操作步骤

操作步骤
如果在运行过程中改变运行方式,驱动装置即立刻关断。工业机器人以安全停止 2 停机。
1. 在 KCP 上转动用于连接管理器的开关。连接管理器随即显示。
1. 在 KCP 上转动用于连接管理器的开关。连接管理器随即显示。
2. 选择运行方式。
3. 将用于连接管理器的开关再次转回初始位置。所选的运行方式会显示在 smartPAD 的状态栏中。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。