



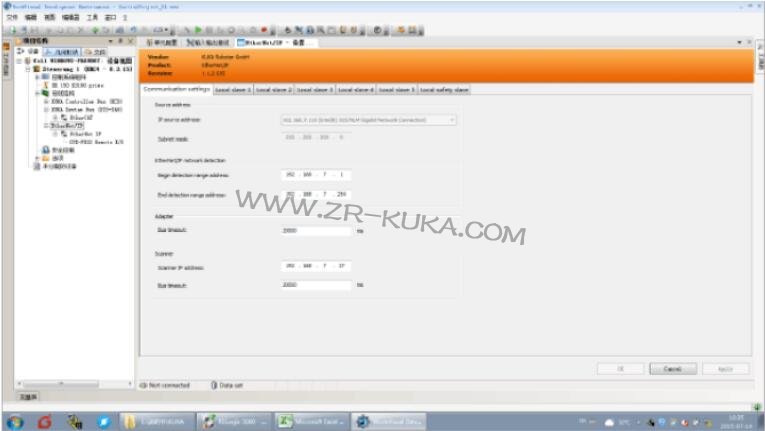
1. 在已经使用workvisual 软件把机器人的原始的程序和参数上载上来之后,可以看到项目的结构如下所示;双击Ethernet/IP ,可弹出如下画面现在可以建立扫描器,在scanner IP address中输入机器人的IP 地址192.168.7.27 ,其他选型可以参考如下图片中所示进行输入; IP source address 中的值不用输入, 可以点击框内下拉按钮,选择你电脑当前的IP 地址即可;
4.
5.

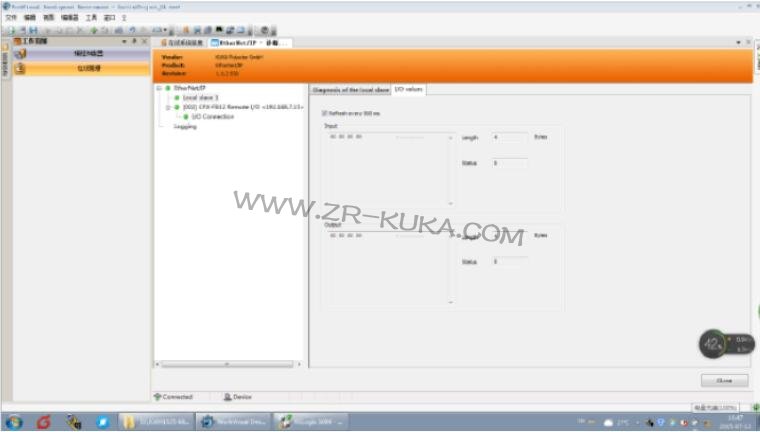
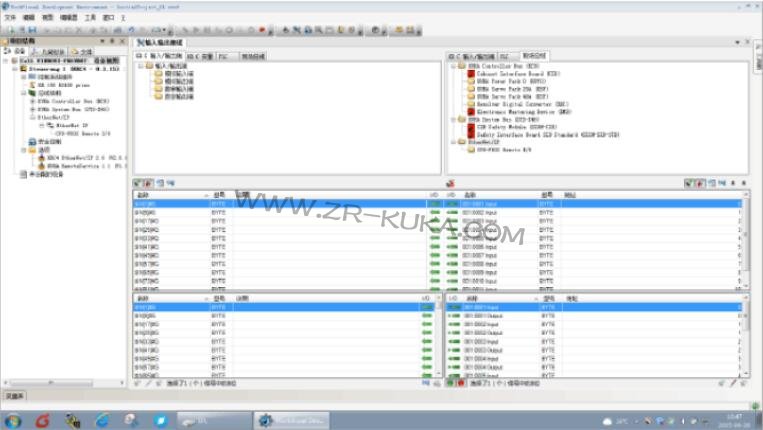
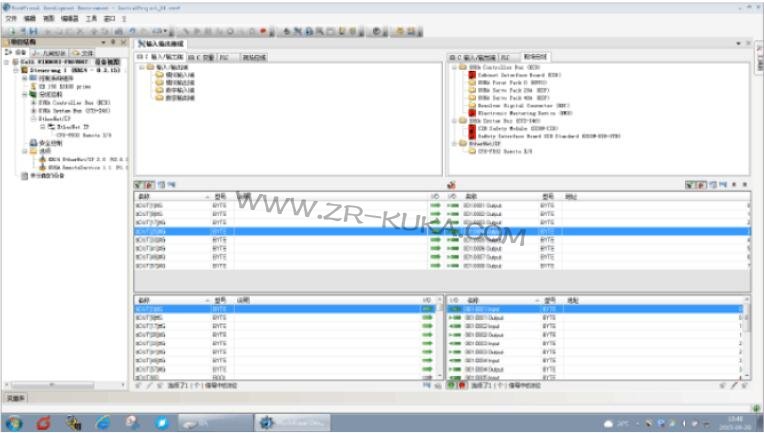
配置成功后监控画面,在这个画面中可以看到通讯状态
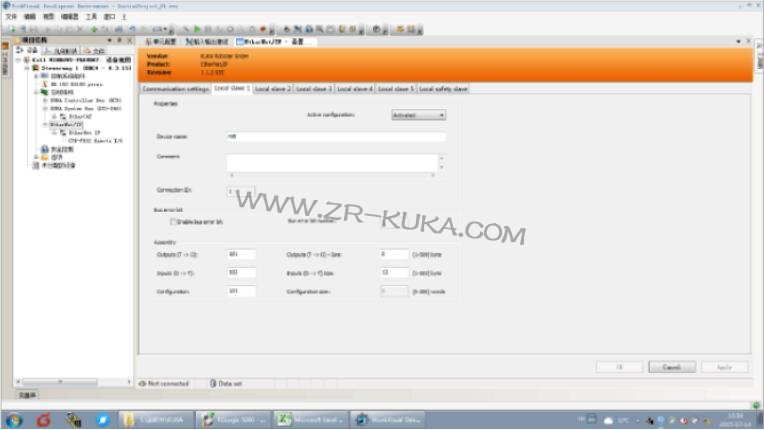
2. 点击Local slave1 按钮进入如下的画面;在这个画面中我们可以给机器人起一个名字,可以配置有多少个字节的数据和PLC进行数据交换;如下图,给机器人起的名字为rob,输入8 个byte, 输出12 个byte,这是将来要和PLC进行数据交换的字节数;
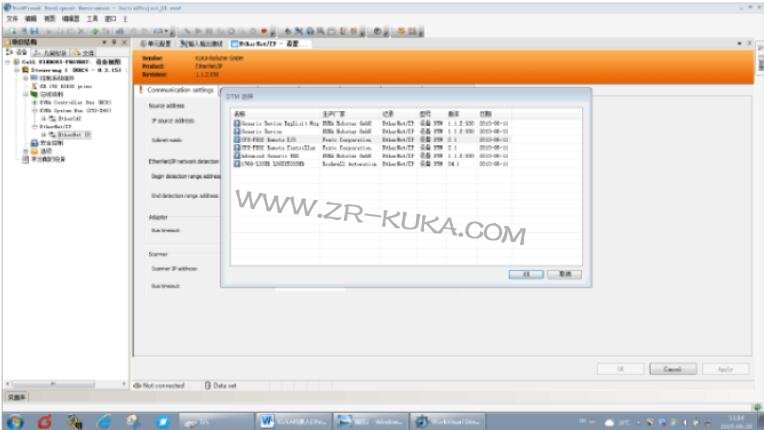
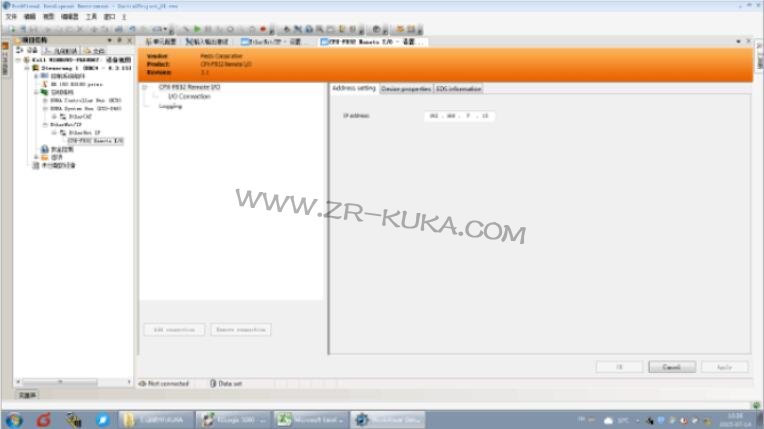
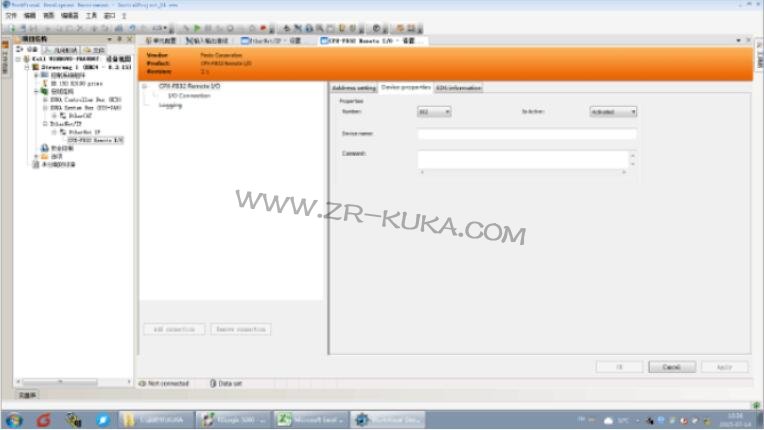
3. 接下来,我们把阀岛配置到机器人上右击Ethernet/IP 选择添加按钮,出现如下画面;选择CPX-FB32 Remote IO 后点击OK;
4.
5.
配置成功后监控画面,在这个画面中可以看到通讯状态