



5.2.1 机器人与PLC 接口通讯
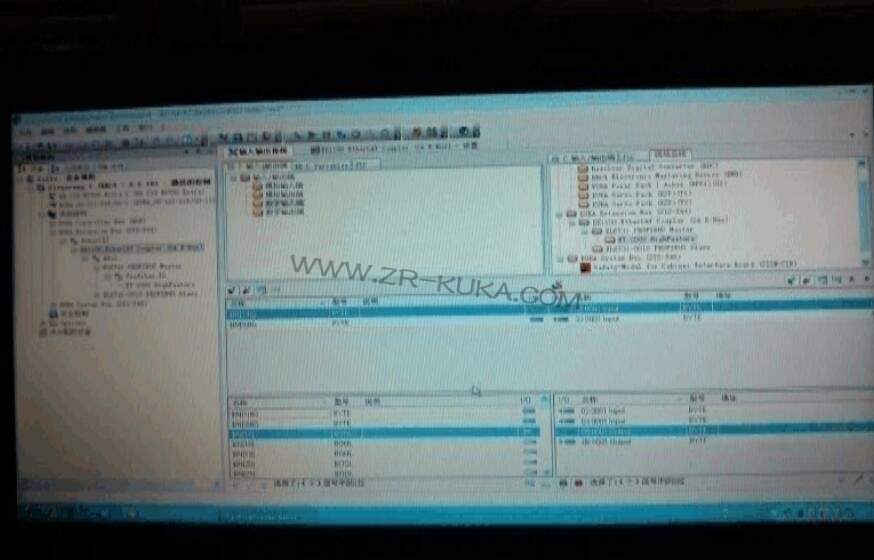
现场采用Profibus 总线(图2.1 )

图2.1
1.1 将现场总线主机粘贴到项目中操作步骤如下:
在窗口项目结构的选项卡设备中展开树形结构,直到节点总线结构可见。
用右键点击总线结构并在相关菜单中选择添加。窗口 DTM 选择随即打开。
选定所需现场总线主机并用 OK 确认。该主机即被纳入树形结构中。
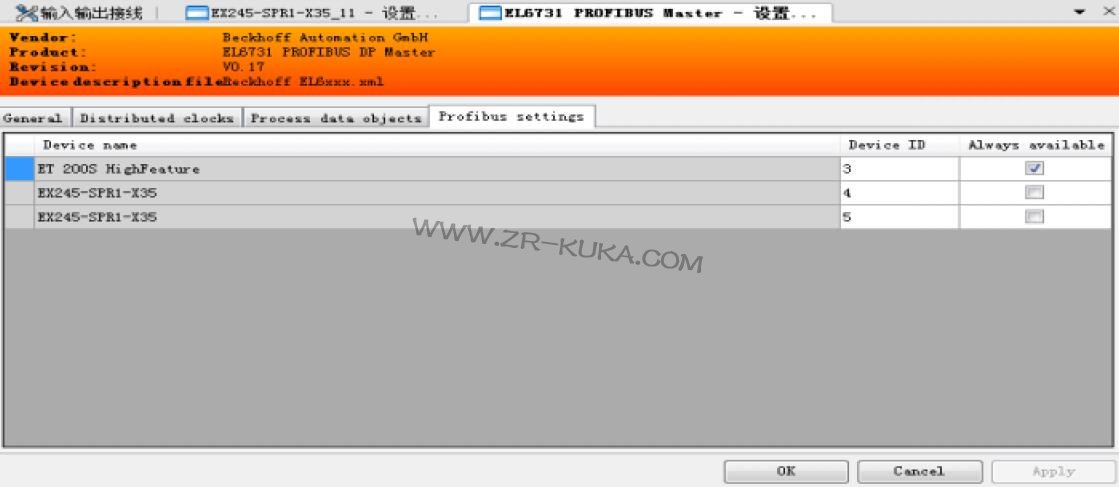
1.2 配置现场总线主机操作步骤如下
在窗口项目结构的选项卡设备中用右键点击现场总线主机。
在相关菜单中选择设置 ... 。一个含有设备数据的窗口打开。
根据需要设定数据,随后用 OK 保存。
1.3 配置设备操作步骤如下:
在窗口项目结构的选项卡设备中用右键点击设备。
在相关菜单中选择设置 ... 。一个含有设备数据的窗口打开。
根据需要设定数据,随后用 OK 保存。
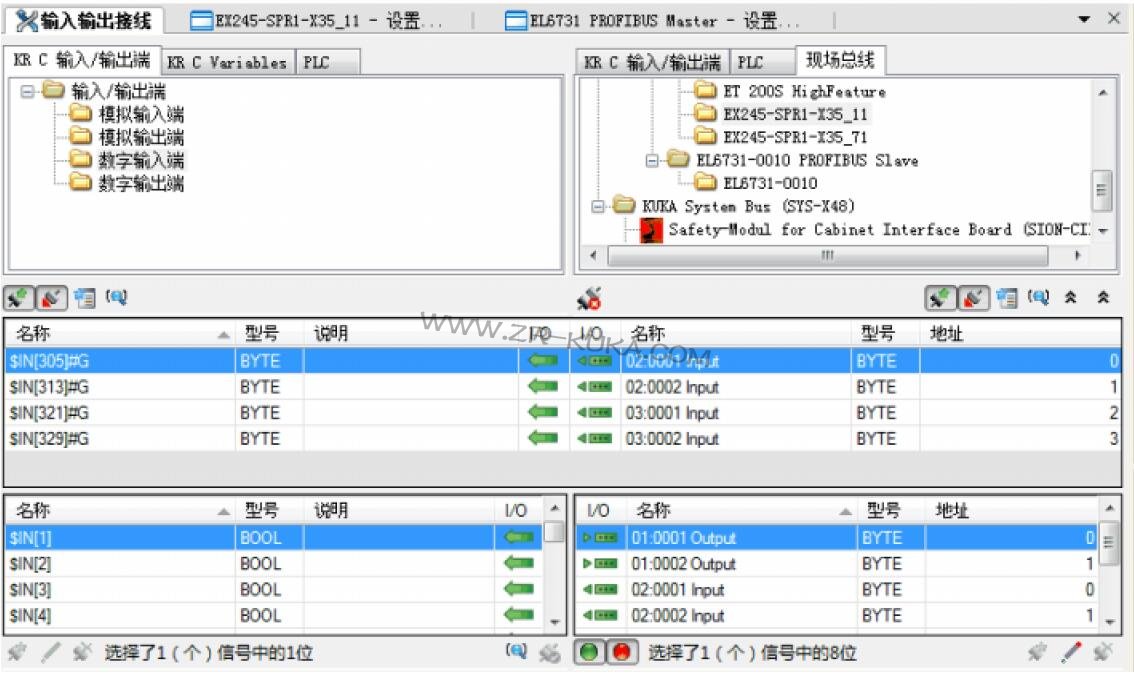
1.4 连接输入端与输出端操作步骤
点击按键打开接线编辑器。窗口输入输出接线打开。
在窗口左半侧的选项卡 KR C 输入 / 输出端中选定需接线的机器人控制系统范围,例如:数字输入端。信号在窗口输入输出接线的下半部分显示。
在窗口右半侧的选项卡现场总线中选定设备。
将机器人控制系统的信号用 Drag&Drop (拖放) 拉到设备的输入或输出端上。(或反之将设备的输入或输出端拉到机器人控制系统的信号上。)信号就此连接完毕。
5.2.2 机器人与焊枪、焊机接口配置
2.1 机器人焊接参数配置
将机器人焊枪进行零点校正;
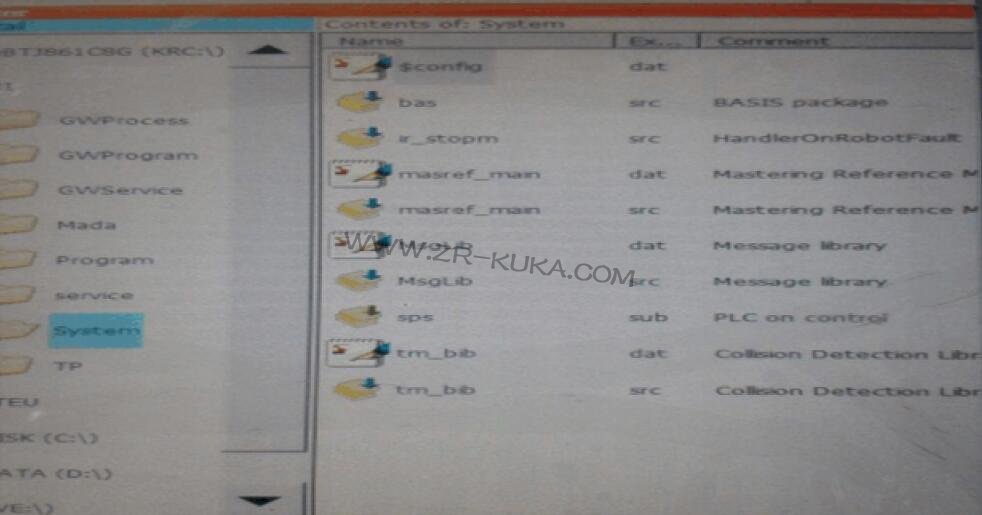
在TP→Servogun_TC 中添加eg_extern.src eg_lib_tc.src
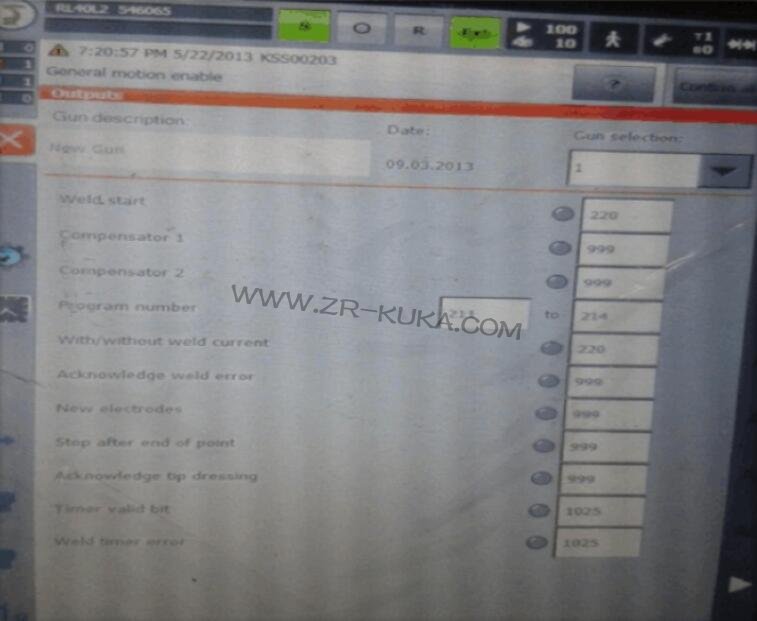
配置→ 伺服强扭矩配置→ inputs→ 将weldend 改为205将with/without weld current 改为1025 将Timer ready 改为204;
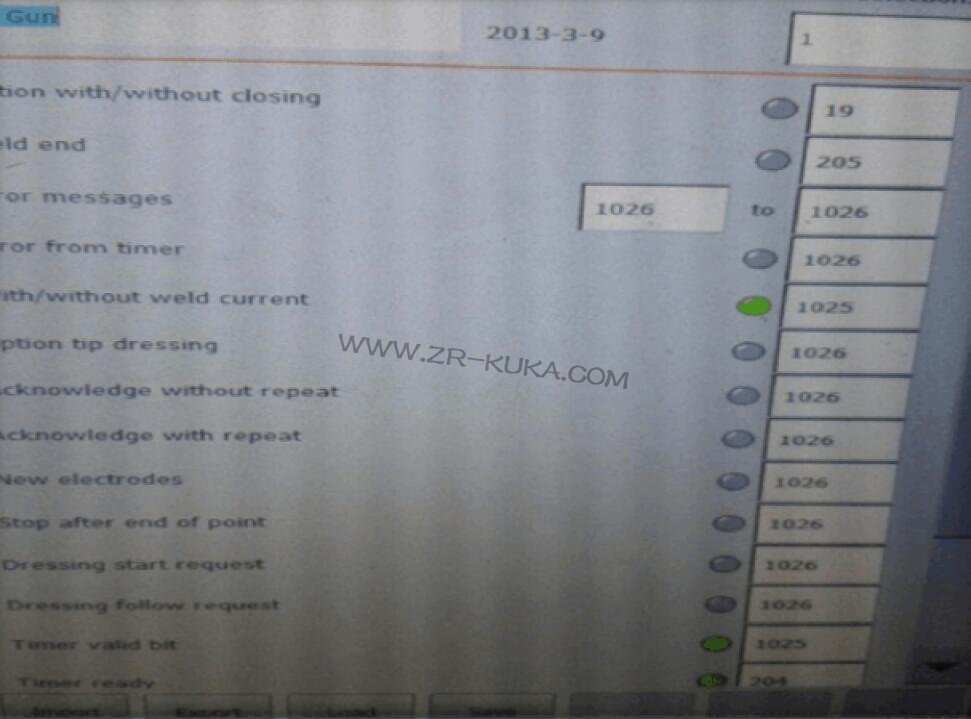
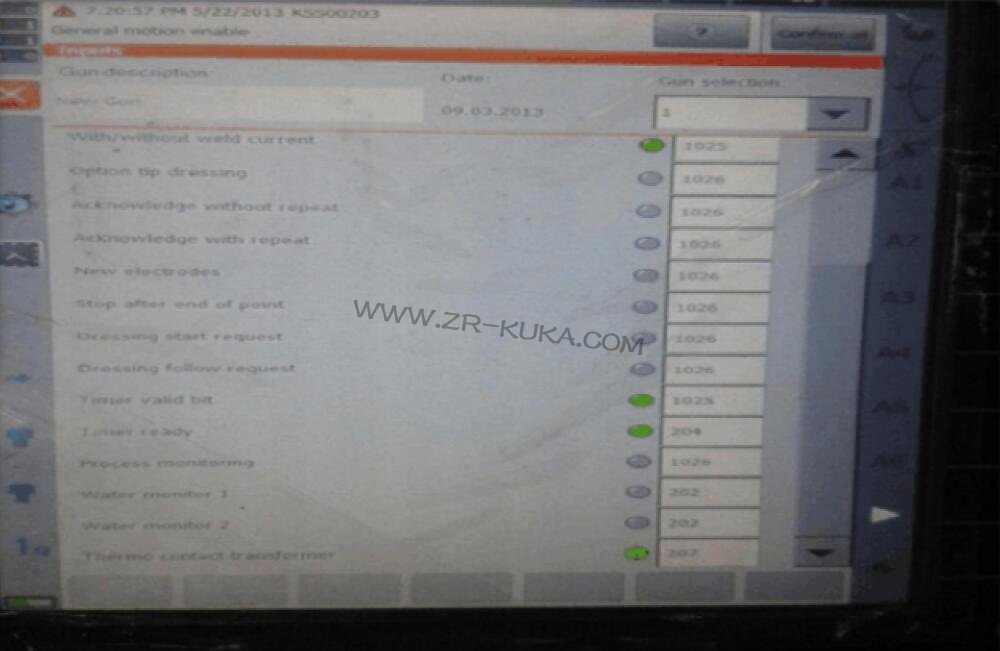
outputs →将weld Start 改为220 、program number 改为211to214 、with/without weld current 改为220
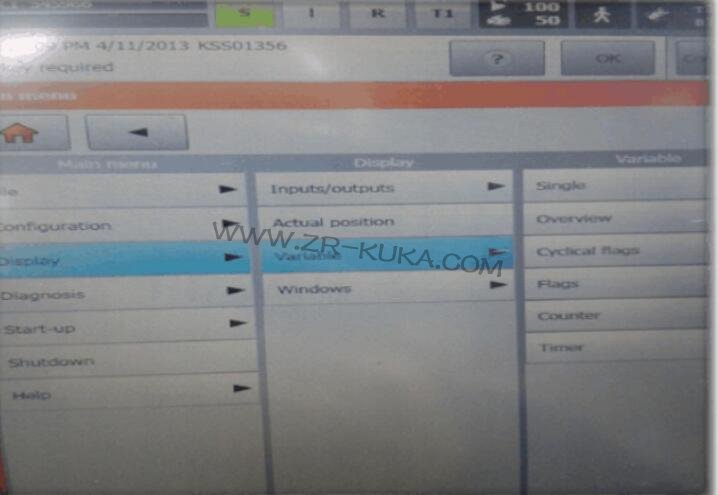
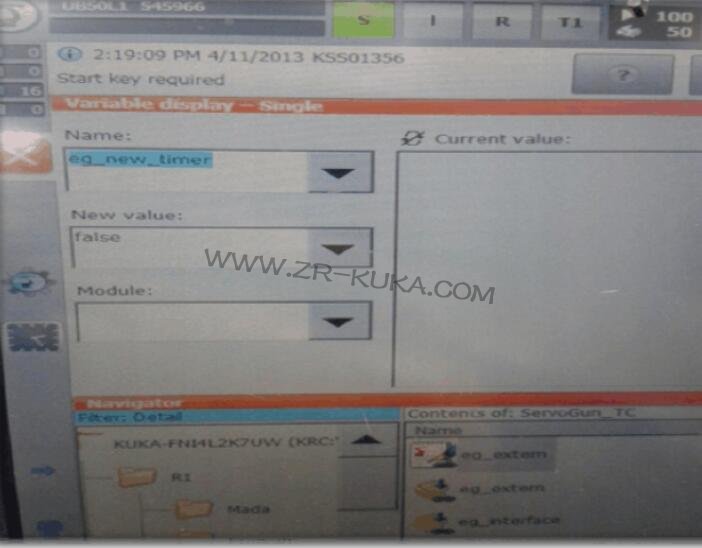
在display→ variable → single→将name 改为eg_new_timer 、将new value 改为false
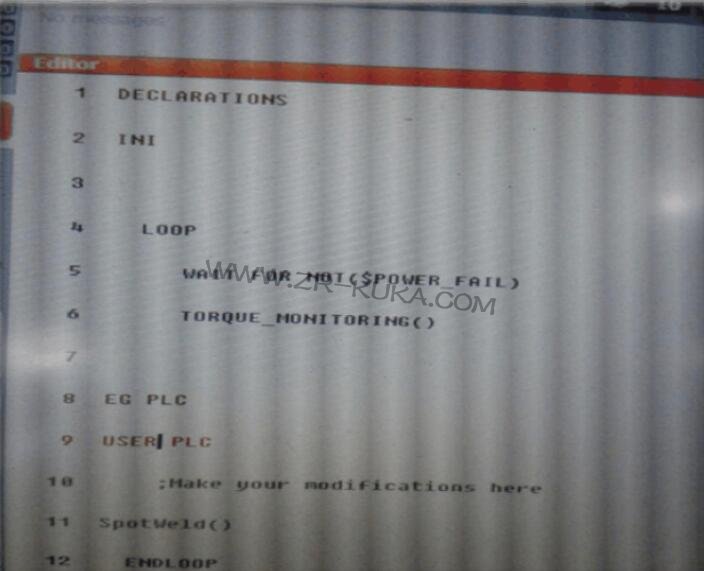
在system 中打开sps 程序→展开第九行user plc,在第11 行输入SpotWeld ()
点开program 文件夹→新建一个文件夹→点击右侧部分→新建选择模块→ open 程序→加入home(此点为全局变量,如果在其它程序中有相同的名称,则点相同)和焊接ptp 语句
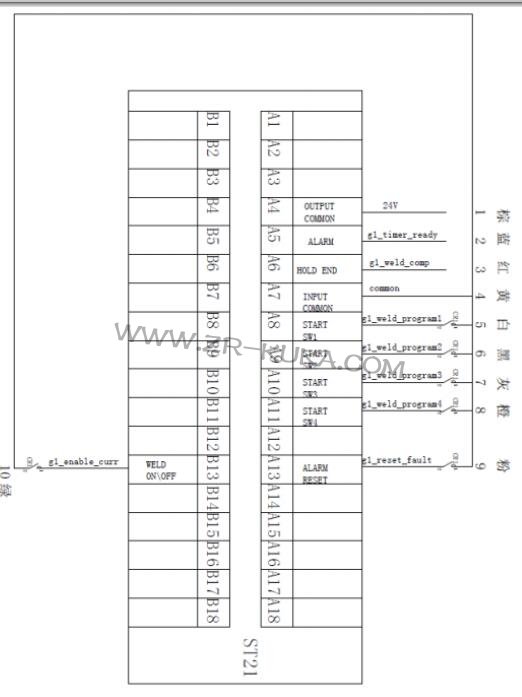
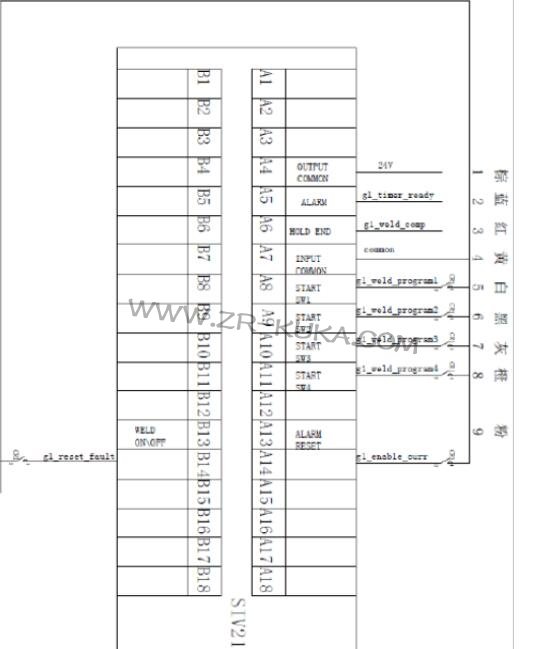
2.2 焊接控制器接线: ST21(小原)系列是工频焊接控制器, SIV21(小原)系列是中频焊接控制器,两种控制器的接法不一样,如图6.1 为工频接法,图6.2 为中频接法。移除A12 和A14 的短接片。
5.2.3 机器人与抓手接口配置
3.1 导入GSD文件
3.2 进行I/O 配置及站地址设置

5.2.4 机器人与水气单元配置
这里我们只用到了水气单元线其中的六芯,其中蓝色线( 0V)和棕色线( 24V)接至控制柜内电源接口处(图8.1 );蓝色线( start_water 输出)接至ET200S对应201 端;蓝色线( air_ok 输入);蓝色线( flow1_ok 输入)接至ET200S对应202 端;( flow2_ok 输入)接至ET200S对应203 端(图2.41 )。