



HR20-1700-C10机器人手动操作示教
本章主要讲述手动操作HR20-1700-C10 系列机器人的相关内容,坐标系的定义及其设置,手动操作的方法,速度设置及手动操作时各状态的确认。通过本章的学习,用户应掌握手动操作的方法和空间坐标系的应用,更重要的是,用户需要通过实际的操作才能更熟练掌握手动操作。

4.1 手动操作界面进入
首先,登陆用户,获取控制权限,如图4.1 是Administrator 用户。注意观察界面上方的状态显示栏。观察状态显示栏是否为手动状态。还要注意是否有伺服报警状态,及速度档次。
图4.1 示教盒最高权限界面
确认状态后,旋转钥匙,按下示教盒上的Position 键,则进入手动操作状态(如图4.2):
HR20-1700-C10机器人编程手册

图4.2 手动界面
4.2 坐标系和速度设置
坐标系设置
在HR20-1700-C10 系列机器人系统中设定了三种坐标系,即关节坐标系、世界坐标
系以及工具坐标系。注意首次进入手动界面默认是关节坐标系,可对坐标系进行切换。
在示教时还要注意界面中角度与位置的信息值。
坐标系定义
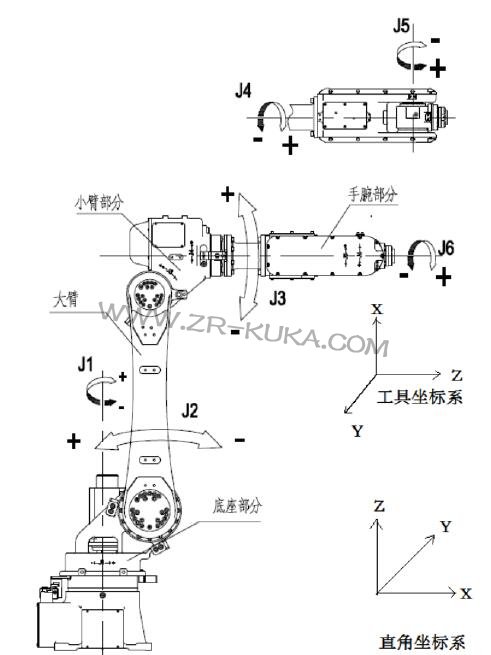
图4.3 机器人坐标系
关节坐标系:即绕各关节转动,正负方向如图4.3所示。零点位置时, 5轴向下为负。
直角坐标系:固定不动,如图4.3所示。原点为机器人底座位置。
工具坐标系:随姿态转动,定义如图4.3所示。未带工具时,末端法兰中心位置为其原点位置,垂直末端法兰向外方向为Z轴正方向。
速度设置:可在0.1%—100%范围内,由用户进行设置。
4.3 手动操作
HR20-1700-C10机器人编程手册

图4.4 关节坐标系显示界面
用户选择好坐标系,设定好运行速度后,按点动键即可对机器人进行手动操作了。
在手动操作前,需要注意开启伺服按钮;点动时,需要按住手压开关。
手压开关分为3 档,上档、中档以及下档;其中只有处在中档时,抱闸才会打开。
4.4 状态确认
在手动界面中观察上方状态栏(如图4.4 所示)观察各状态信息。
手动:此状态信息显示当前所处的界面操作权限显示为16。
报警:此项可以观察当前是否存在报警,如果存在报警,则当前项颜色为红色,并且系统显示区有报警信息内容。
伺服状况
1) 伺服关:伺服未上电时Motion 状态灯灭。
2) 伺服开:伺服已上电时Motion 状态灯颜色为绿色。
速度:状态栏上显示当前速度百分比。
4.5 位置数据
机器人位置数据包括机器人的位置和姿态。示教机器人时,位置数据需同时记录存入程序。
位置数据有两种类型:
1) 一种是各轴基于零点的角度偏移量矩阵;
2) 一种是基于笛卡尔坐标系的工具位置和姿态的坐标矩阵。
关于坐标系的详细介绍, 请参照2.6章节。关于数据管理的内容, 在后续章节中介绍HR20-1700-C10系列机器人有两个界面显示位置数据:
一种是手动界面的位置数据如图4.5所示,初始界面按示教盒上的“MOVE”键可进入手动界面,手动界面下显示的位置数据为机器人当前位置的实时数据,其中:
1) A1—A6 为各轴角度坐标值;
2) X、Y、Z、A、B、C为世界坐标系下坐标值;

图4.5 世界坐标系显示界面

图4.6 关节坐标系显示界面