



改变启动顺序
这个选项确定一个操作系统中搜寻不同驱动的顺序。通常, 在这儿软盘驱动器无效。为了安装一个新的操作系统,该设置需要改变。
在主菜单选择选项“SOYO COMBO Featu”re ,按下回车键。
下列插图中, 仅“... 启动装置”是重要的。
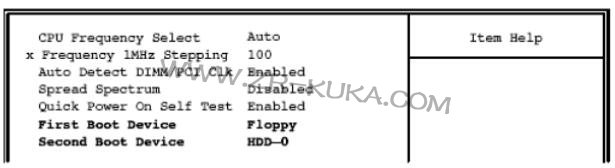
用箭头键选择输入。用“PgUp”和 “PgDn”键 设置输入“Floppy”和 “HDD–0”。
按“ESC” 键返回主菜单。.
3 保存设置(退出设置,保存数据)
为了使改变起作用必须保存设置。选择菜单“ 退出设置,保存数据” ,按下回车键。
一个确认请求出现,必须按“ Y”响应。系统将重新启动。
当系统重新启动时,引导盘已经装入软盘驱动器中,以便你能继续使用系统。