





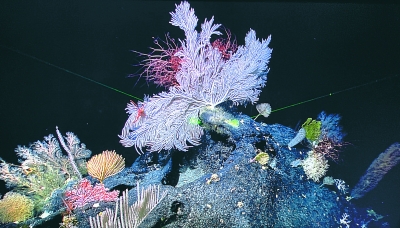
“发现”号遥控无人潜水器在海山拍摄到的“海兔”(上图)和“海底花园”(下图) 。新华社发






原标题为:中国水下机器人有多牛?
柯博
新闻背景
近日,一些中国水下机器人在深海拍摄的画面吸引了很多人的眼球:“科学”号科考船上搭载的“发现”号遥控无人潜水器拍摄了“海底花园”,还采集到两只头部粉红色、身体发白的蜗牛状软体动物深水海兔;“深海勇士”号载人潜水器在2000米深海作业的高清视频也首次曝光,为我们展示了一片神奇的海底世界……
事实上,包括“发现”号和“深海勇士”号在内,我们国家研发的水下机器人已经形成了一个“家族”,这里我们就来介绍其中有代表性的一些成员。
“海人一号”
我国首台水下机器人
海洋占地球表面的绝大部分,孕育着无尽的资源和丰富的宝藏,开发利用海洋资源成为各个国家竞相发展的战略。水下机器人是探索海洋的重要手段。水下机器人,通常来说可以分为三大类:有缆水下机器人(简称ROV),无缆自治水下机器人(简称AUV)和载人潜水器(简称HOV)。
根据国内市场需求,1979年,以中国工程院院士蒋新松为首的团队在国内最早提出了海洋机器人研究计划。1982年,中国科学院正式立项,开展“智能机械在海洋中的应用研究”。
我们国家的第一台水下机器人诞生于1985年,它叫“海人一号”(HR-01),是一台有缆水下机器人。
由沈阳自动化所负责研制的“海人一号”样机于1985年12月在大连首航成功,1986年,改进后的“海人一号”完成了海上试验。
“海人一号”总功率20马力、最大作业水深200米,是我国科研人员完全依靠自主技术和立足于国内的配套条件开展的研究工作,是我国水下机器人发展史上的一个重要里程碑。
“探索者”号
我国首台无缆自治水下机器人
1994年,沈阳自动化所成功研制了“探索者”号自主无缆水下机器人。它的工作深度达到了1000米,并且甩掉了与母船之间联系的电缆,实现了从有缆向无缆的飞跃。
当年10月, “探索者”号在中国南海进行了5个航次的海上试验,并在西沙群岛附近成功下潜1000米水深,成为我国到达深海的先驱者。
CR-01 我国首台面向6000米的无缆自治水下机器人
1992年,沈阳自动化所与俄罗斯海洋技术问题研究所、国内中船总702所、中科院声学所等单位合作,着手研制6000米级自主水下机器人——CR-01。
它分别在1995年、1997年两次赴太平洋开展调查工作,获得了大量海底多金属结核录像、照片及声图资料,为开辟区资源勘察提供了重要的依据。它的成功,使中国成为了当时世界上少数几个拥有6000米级水下机器人的国家之一。
它研制成功的意义还在于,我国具有了对除海沟以外海域进行详细探测的能力。1991年,中国大洋矿产资源研究开发协会被联合国批准为第五个深海采矿的先驱投资者,承担30万平方公里洋底的探测任务,并最终拥有对矿产资源最丰富的7.5万平方公里海域的优先开采权。CR-01为此提供了强有力的技术手段。
1997年,CR-01被评为中国十大科技进展之一,同年获得中科院科技进步特等奖和综合重大成果奖。
北极ARV 水下机器人走向极地科考
ROV,AUV,HOV我们都知道了,那么ARV又是个啥?2002年,沈阳自动化所在国内首次提出了ARV概念——ARV是一种集AUV和ROV技术特点于一身的新概念水下机器人。
2008年7月,第一代北极ARV搭乘“雪龙”号科考船,随队出征我国第三次北极科考。2010年7月再次参加我国第四次北极科考任务。在北纬86度50分首次从冰洞下放,开展冰下调查工作并取得成功,刷新了我国水下机器人在高纬度的作业纪录。
北极ARV对于北极科考来说,可以说是一种有效、连续、自主、实时的观测手段。看似不大的北极ARV携带了温盐仪、光通量测量仪和水下摄像机等测量设备,具有多种科学观测能力。可获得冰下光透射辐照度、冰底形态、海冰厚度、温度、盐度、深度和海洋环境参数等多种科学观测数据,极大地补充了现有的北极冰下监测手段。
“蛟龙”号控制系统 龙脑诞生记
2012年7月,“蛟龙”号载人潜水器(HOV)圆满完成7000米级海上试验,最大下潜深度达到7062米。沈阳自动化所作为蛟龙号主要研制单位之一,承担了控制系统的研制和技术保障任务。