



迪士尼的研究人员研发了一种新算法,可以将使用传统动画软件创造的动作转移到机器人身上,同时减少机器人运动产生的机械振动。
迪士尼的研发团队在SIGGRAPH 2019上发表的论文《Vibration-Minimizing Motion Retargeting for Robotic Characters》,介绍了这种机器人减振方法,能有效的使机器人做出动作时不再发生剧烈摇摆。
下面我们一起根据迪士尼的动画演示直观的了解一下这种减振算法能产生什么样的效果。
一、新算法能预测机器人振动
由于物理定律,设计和编程机器人很难做到让机器人在运动过程中保持平稳的移动。当机器人部件动态移动时,工业机器人维修,它所连接的所有东西都会发生形态变化。
机器人振动优化算法能否起作用,很大程度取决于机器人模型本身的优劣。随着机器人变得越来越复杂高效,它能够发生形态变化的部件也越来越多。从本质上来讲,每一处能发生弯曲的部件都会引发另一个部件的变化,这就会导致机器人全身产生剧烈的晃动。
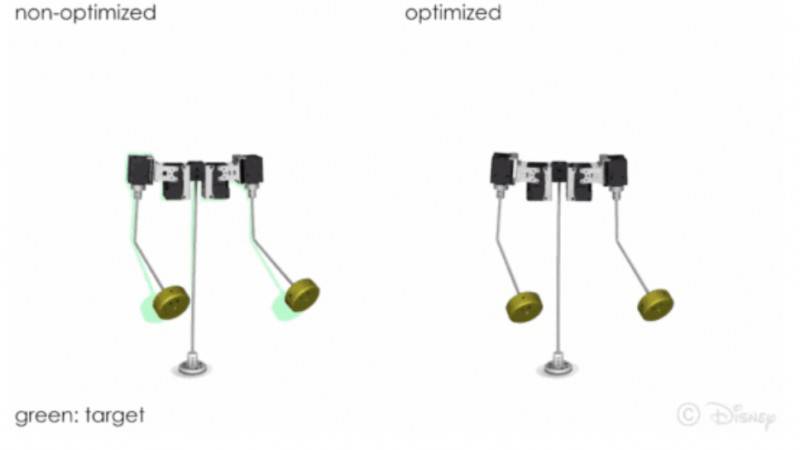
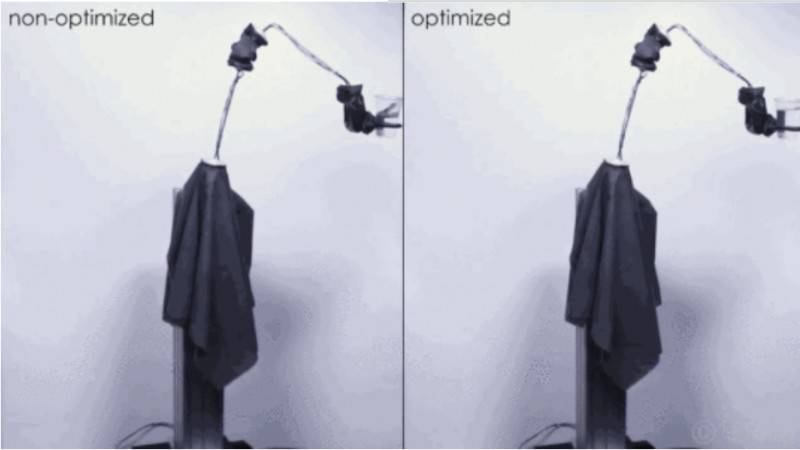
如果机器人非常庞大且坚硬,那它发生的弯曲和晃动可能并不明显,但轻量级、设计用于人类周围的机器人在做出动作时会有明显的形态变化并产生晃动。这些部件的晃动会使机器人无法高效的完成任务,甚至可能造成破坏。
迪士尼的动画设计师重新设计机器人要做的特定动作,结合新算法优化机器人运动产生的振动。这个算法工具还能预测机器人将产生怎样的振动,然后向电机发出指令,KUKA机器人维修,库卡机器人,进行微小但精准的额外动作来消除振动,同时仍然使机器人按照动画设计的方式运动。
二、机器人打拳击也不会晃
研究人员解决机器人运动产生晃动问题的方法是,优先抑制最明显的大振幅振动,即使是在结构相对复杂的机器人上,这种优先条件也能发挥作用。
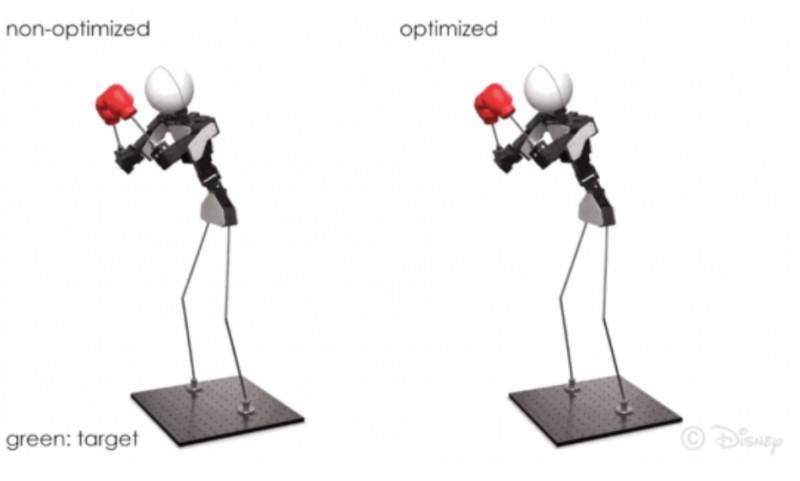
在拳击动作的演示中,研究人员将动画重新定位成具有13个自由度的人形机器人,在仿真模型和系统上用拳击手套代替双手。拳击动作包含更快速的运动和突然停止。
加速的动作会导致过度的振动,特别是机器人闪避并移动上半身时。在使用算法进行优化前,机器人电机控制运动有9厘米左右的晃动,经过研究人员和动画设计的同时优化,电机控制的晃动被缩小在1.5厘米以内,并保持了输入的动画没有明显的视觉差异。
结语:机器人稳定性研究成为新方向
随着科技的发展,机器人技术也在不断进步,越来越的的机器人开始出现在人类的日常工作和生活中。但目前,这些机器人的研究都还在朝着能让机器人做出更多动作、具备更多功能的方向发展。
加强机器人的稳定性,不仅能提高它的工作效率,也能更好的保护机器人各个部件不受损坏。机器人的功能变得越来越复杂,能完成的任务也越来越丰富多样,如何让机器人能更稳定高效的完成任务成为了机器人技术发展新的研究方向。