
- 什么是有效负载?如何控制您的库卡机器人?
- KUKA库卡机械手KR360维修保养技巧分享
- 维修保养|库卡KUKA机器人KR 210维修保养经验丰富
- 库卡KUKA机器人维修保养小手册
- 维修保养|KUKA库卡机器人维修保养干货知识



斯坦福大学开源了一个四足机器人平台
摘要:斯坦福大学的学生们近日创造出了一个新的四足机器人:Doggo,并且,工业机器人维修,他们希望这个机器人能够走向全世界。
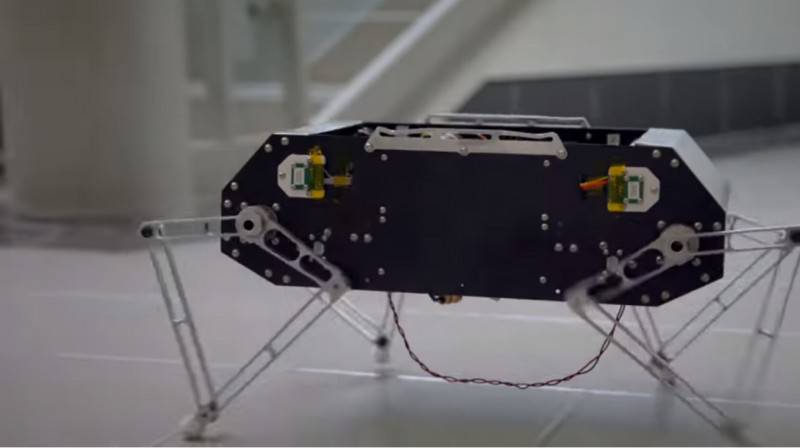
Doggo机器人采用与其他小型四足机器人类似的设计,但其独特之处在于其低成本和可访问性。相比较其他机器人,它们的成本可能高达数万美元,但Doggo机器人的创造者——斯坦福大学的极端机动性实验室的研究人员估计Doggo机器人的总成本不到3000美元。更重要的是,这个设计已经完全开源了,这意味着任何人都可以打印组装出他们自己的Doggo机器人。
机械工程专业和极端机动性实验室的负责人Nathan Kau在一次大学的新闻发布会上说:“我们看到了这些用于研究的其他四足机器人,但它们并不能用于实验室,也无法成为你自己的东西。我们希望斯坦福的Doggo能成为这种开源机器人,这样,你就可以用相对较小的预算成本来建立自己的机器人。”

斯坦福大学的Doggo机器人可以做小跑,翻转,跳跃等工作。
虽然Doggo机器人的生产成本低,但由于其腿部机构设计的改进和更高效的电机使用,KUKA机器人维修,实际上,它比那些昂贵的机器人表现更好。相比Ghost Robotics公司的同样尺寸和形状的Minitaur机器人(成本高达11500美元),Doggo机器人的扭矩更大,而相比MIT的猎豹3机器人,它的垂直跳跃能力更好。

一些研究人员认为,www.zr-kuka.com,像Doggo这样的机器是即将到来的机器人革命的一部分。带腿的机器人正变得越来越有能力,像波士顿动力、Agility Robotics和Anybotics等公司开始将它们定位为有用的工具,比如现场勘测、监控、安保甚至运送包裹。
像Doggo这样的低价机器人平台能让研究人员迅速改进控制系统。目前,Doggo及其同类机器人是由大学和实验室制造的,但很快,它们会踏入现实世界。