



如果机器人真的能帮我们做家务,或者照顾我们受伤的人和老人,它们至少需要双手。但是使用双手比我们想象的要困难得多,所以这个机器人控制系统在尝试做同样的事情之前,会先向人类学习。
这是一项来自威斯康辛大学麦迪逊分校的研究,它们最初的想法并不是建造一个双手机器人,而是简单地创建一个系统,使机器人无需思考就可以理解并执行与人类一样的操作。

例如,当你需要打开一个罐头时,需要用一只手抓住它并把它移到适当的位置,然后另一只手抓住盖子并拉紧把手拧开它。
在这种基本的双手动作中,仍包含相当多的动作步骤,以至于现在要求机器人自主地做这件事是非常困难的。但是,这个机器人仍然可以大致了解为什么在这种情况下进行这种操纵,并尽其所能去模仿它。
研究人员首先让戴着运动捕捉设备的人执行各种模拟的日常任务,比如叠杯子、打开容器、倒出里面的东西等等。所有这些数据包括手的方向、它们的互动方式等等都会被机器学习系统感知并反复思考。
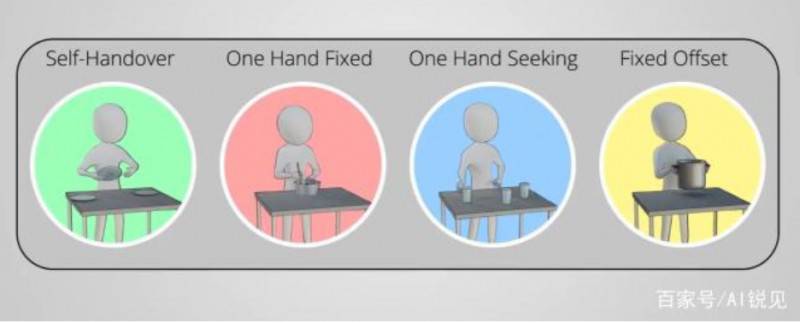
最后总结出四种人类常做的手部动作:自我交接,一手固定,双手搬移,一手寻找。机器人把这一知识运用到工作中,对人类所做动作进行解释。
你可能会认为,当一个人远程控制一个机器人时,它会准确地反映出这个人的动作。在测试中,机器人这样做只是一个基线,许多动作是根本不可能做到的。
想想打开罐头的例子,当我们打开罐头的时候,我们必须用更用力地保持一边的稳定,甚至可能要用罐子的手推回去,来对抗另一只手的力量。
如果你试图远程操作机器手臂,一只手可能会把罐头从另一只手里敲出来,或者因为另一只手没用力而抓不住它。
研究人员创建的系统能够识别上述四种行为何时发生,并采取相关措施。这意味着,当它们拿起水桶时,要意识到两只手臂共同用力。
或者在开启容器时,工业机器人维修,为握着物体的手臂提供额外的力量。在只使用一只手的情况下,系统也知道剥夺未使用的手的运动,将更多的资源(无论是身体运动还是计算能力)奉献给工作的手。
当然,库卡机器人,这一切都或多或少是由人类来完成的,但是人类的行为正在被增强,机器人维修,并且不仅仅是简单的机械复制。
机器人自主完成这些任务还有很长的路要走,但是像这样的研究是这项工作的基础。在机器人尝试像人类一样移动之前,它不仅要了解人类是如何移动的,还要了解为什么他们在某些情况下做某些事情,而且还要了解其中重要的点,比如规划手的路线、选择握柄位置等。