



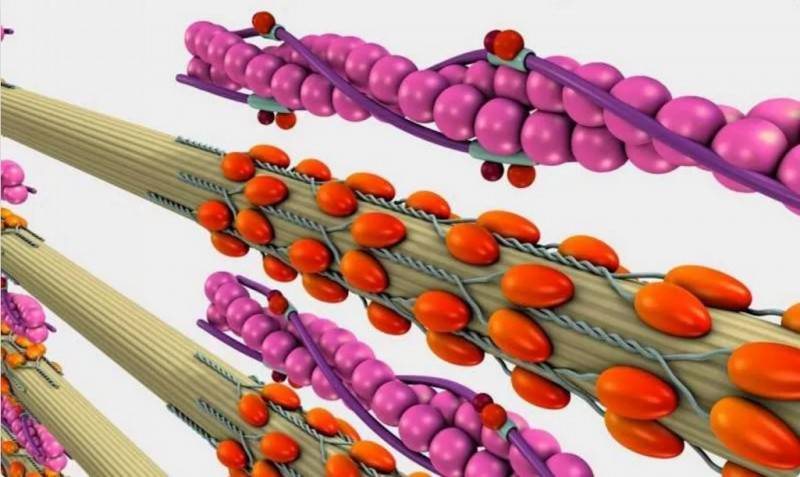
运动依赖于肌肉,像肌动蛋白沿肌动蛋白网络运动的生物运动,就是负责所有生命形式中的大多数运动方法。因此,美国人研究认为,在机器人研究领域,人造纳米电动机的发展可能会改变游戏规则。
美国陆军作战能力发展司令部的陆军研究实验室的研究人员一直在寻找一种设计,该设计可以使人造纳米电动机利用布朗运动,而粒子的特性只是因为它们是会产生热量的,所以会激动地运动。为了使机器人在战斗中成为更有效和多功能的队友,陆军研究人员的任务是理解肌肉分子生命功能的价值,以及为了人为地实现目标而必须复制到机器人上的基本机制,例如研发原本由肌肉收缩负责的的蛋白质产生的能力。
CCDC ARL研究人员认为,了解和开发这些基本力学是朝着明智的方向做出决策的必要基础步骤,该决策涉及机器人的新方向的可行性,其中涉及合成生物学,机器人技术以及动力学和控制工程的融合。
《生物力学工程杂志》最近发表了他们的研究成果。
CCDC ARL研究人员Dean Culver说:“通过控制简单杠杆臂设计的不同几何特征的刚度,我们发现可以利用布朗运动使纳米电机更能够达到产生线性运动的理想位置。”Dean Culver称。“这种纳米尺度的功能可以在宏观尺度上实现更节能的致动,这意味着机器人可以在更长的时间内为战斗人员做更多的事情。”
根据Culver的说法,通常在肌肉收缩中对蛋白质相互作用的描述相当高。更具体的说,研究团体没有使用描述作用于单个蛋白质以寻求其对应物的作用力,而是规定了发生结合或释放事件的条件规定或经验速率函数,来复制这种生物力学过程。
Culve说这些被广泛接受的肌肉收缩模型类似于对汽车发动机的黑匣子理解。“在汽车发动机中,更多的天然气,往往意味着更多的动力,它的重量如此之大,并占用了如此多的空间,因此碰触就可以燃烧。但是,你无法为机器人设计出具有这种表面水平信息的汽车发动机。我们需要了解活塞的工作原理,以及需要如何精细调整注射,这是对引擎的组件级理解。我们深入研究了构建的蛋白质系统的组件级机制,并展示了生命功能的设计和控制价值以及更清晰的理解设计参数,这些参数对于综合再现这种实时功能至关重要。”
Culver指出,就分子马达的能量产生而言,ARL已在组件级别说明了布朗运动将束缚粒子从不利的弹性位置移动到有利位置的能力,这是ARL设计中的关键步骤,这一创造性成果使得人造纳米马达具有与生物纳米马达相同的性能。
军事机器人往往为机器的噪音所困扰,Culver说:“这项研究为快速,多功能的机器人添加了一个关键的谜题,这些机器人可以执行自主战术机动和侦察功能。” “这些模型将成为静音,低热信号和高效的分布式执行器设计的组成部分,这些功能将使这些机器人在现场更具影响力。”Culver指出,它们之所以能保持安静,是因为肌肉在致动时不会发出很多噪音,尤其是与电动机或伺服器相比,肌肉在致动时会相对较冷,因为肌肉中产生的热量远远少于同类电动机,并且由于分布式化学能模型的优势以及通过布朗运动潜在逸出。
根据Culver的说法,受动物肌肉中生物分子机器启发的执行器的广泛应用仍是未知的,但是许多现有的应用领域在陆军中都有明确的应用,例如生物启发的机器人技术,库卡机器人,纳米机器和能量收集。Culver说:“因此,在这一领域进行基础和探索性研究是对我们未来作战人员能力的明智投资。”
展望未来,这项研究有两个主要扩展。
Culver说:“首先,机器人维修,我们需要更好地了解分子,如本文中讨论的束缚粒子如何在更复杂的环境中彼此相互作用。” “在《生物力学工程杂志》论文中,我们看到了束缚的粒子如何有效地利用布朗运动来有益于整体肌肉的收缩,但是第一个模型中的粒子处于理想化的环境中。在人体内,它浸没在携带许多不同分子的液体中离子和溶液中含有能量的分子,这是分子电动机的单电动机,纳米级模型的最后难题。”
Culver说,第二个扩展是使用完整的3D模型重复这项研究,为按比例扩大到实际设计铺平了道路。
同样值得注意的是,由于这项研究还很年轻,ARL研究人员使用该项目与学术界的其他研究者建立了联系。Culver说:“依靠他们的专业知识在未来几年将至关重要,我们在与华盛顿大学,www.zr-kuka.com,杜克大学和卡内基梅隆大学等地的教职员工和研究人员取得联系方面做得很出色。”
卡尔弗认为,在合作伙伴的帮助下将此研究项目进一步发展,将为未来的士兵提供巨大的作战能力,这是考虑到不断变化的战场性质的一项关键要求。