



近年来,伴随着3D传感行业的迅猛发展,机器视觉迎来轰轰烈烈的第四次视觉革命。许多机器人公司也都开始了3D视觉的研究,本次的应用案例来自勃肯特机器人,其采用了结构光相机配合自主研发的串并混联六轴机器人,完成3D视觉相关检测项目,据了解即将投入实际应用阶段。
视觉升维迎来历史性的技术爆发,让其他三次视觉革命都略显黯然失色,第四次视觉革命最大的特点体现在机器直接从之前的2D平面“视界”进化到3D立体“视界”,刷脸支付、Face ID、VR、无人便利店、智能机器人等人工智能产品从实验室走向普罗大众身边,频频以“未来产品”姿态曝光,其背后起到关键作用的黑科技便是3D视觉技术,3D视觉技术也已经成为人工智能界的新宠。
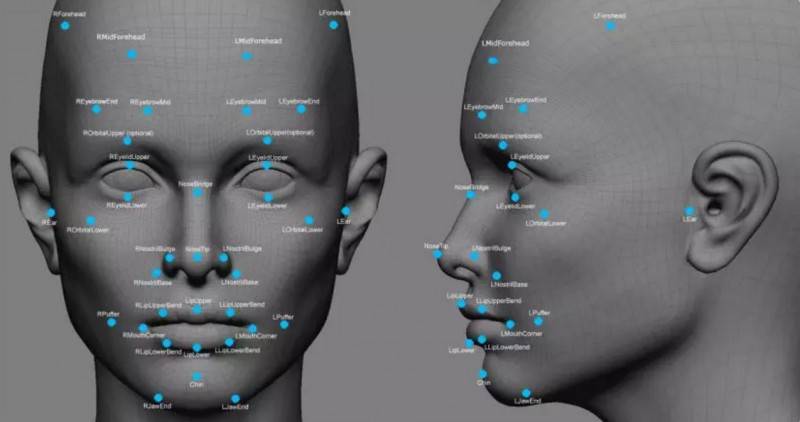
人类利用科技提升机器的视觉能力,模拟人的双眼,这听起来似乎没什么了不起。但是在商业应用中,3D视觉的影响力不亚于在亚马逊森林搅动风暴的蝴蝶,以目前火爆市场的支付宝刷脸支付为例,拿目前出货量最多的3D视觉代表性企业奥比中光来说,搭载了其3D结构光的刷脸支付产品,能够通过点阵投影仪把数万个光点投射到用户的面部,通过3D摄像头找到对应光点,再利用三角测量原理计算出光点的深度信息,从而达到3D面部识别的效果并完成支付。
相比过去2D视觉的人脸识别,3D视觉能轻易识破平面照片或者视频等欺骗,让支付的安全性和便捷性得到革命性升级。同时在机器视觉技术的帮助下,刷脸支付能够带来更好的体验,大大降低安全隐患。
工业机器人领域获取外界物体三维信息的传感器主要有以下三种,传统RGB双目相机、结构光相机、TOF相机。

三种主流三维信息获取设备,图源:勃肯特机器人
应用场景主要集中在三大板块:
(1)通过3D视觉快速准确的对纸箱进行尺寸测量,完成物流行业随机尺寸纸箱的拆垛和码垛;
(2)在生产线上,多种型号的工件往往会被杂乱无章的堆放在料框里,同时这些工件的形状外观差异很大,通过3D视觉可准确获取料框内物体的三维轮廓特征信息,机器人可快速精准的完成多品类工件的分拣;
(3)在轻工行业,通过3D视觉获取物体的三维轮廓信息,KUKA机器人维修,使机器人高速高精度完成涂胶、喷涂等相关工作。
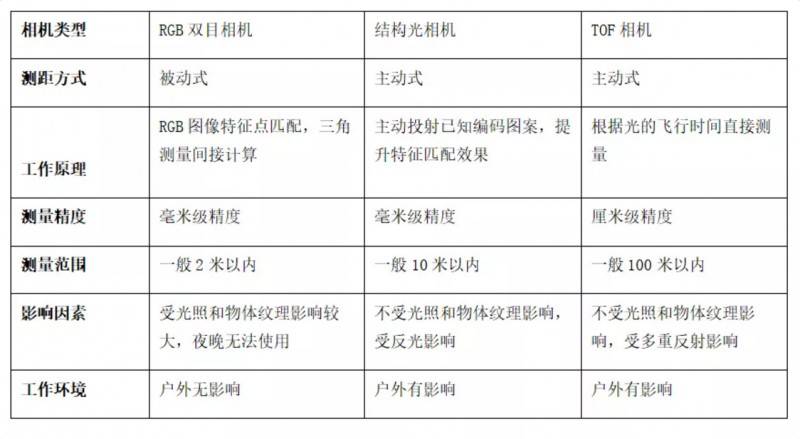
三种技术方案对比,图源:勃肯特机器人
与3D视觉的立体成像相得益彰,混联六轴由3P-3R结构组成,即三自由度的并联机构与三自由度的串联机构组成,实现了6自由度更大空间的运行,在保持了原有并联机构特点之外,增加了拾取物品位姿随机、末端摆放自由灵活、理料与分拣双工艺结合的特点。
勃肯特的解决方案中,运用3D相机完成立体物料的视觉信息捕捉后,可实现机器人根据物料在三维空间内的位置与角度判断,解决了以往机器人只能进行平面抓取的弊端,可实现对堆叠来料的快速理料,同时也开拓了对不规则、不平整来料进行涂胶、注塑等工艺,丰富了更多应用场景。

勃肯特串并混联六轴机器人,图源:勃肯特机器人

勃肯特自主研发机器人控制器与结构光3D相机,图源:勃肯特机器人
据了解,,类似于传统2D视觉,工业机器人维修,勃肯特自主研发机器人控制器与结构光3D相机首先对相机进行标定,采用Eye to hand的安装方式,在完成相机内参标定后,结合棋盘格对相机外参进行标定。外参数标定即确定相机与外界的平移和旋转关系。利用经典的AX=XB齐次坐标求解方法,让机器人末端在棋盘格上移动多个位置,记录其坐标值,求出转换矩阵,完成相机标定。
然后对点云预处理,去除外界干扰产生的噪点后,通过对点云进行平面分割和目标提取,完成场景中目标物体的分割及其特征的提取。并且通过特定算法完成目标物体的位姿估计和优化,最终完成串并混联六轴机器人在3D视觉作用下对不同形状物体快速精准的分拣。
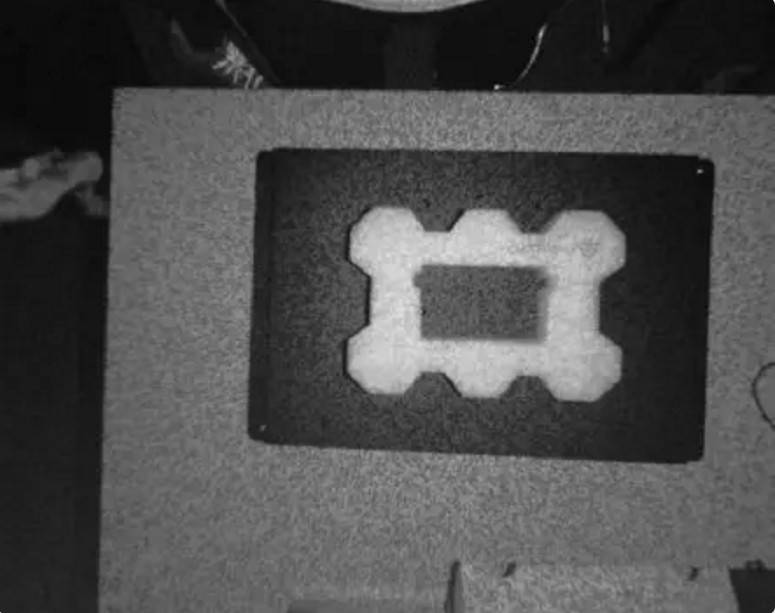
相机采集的原始图像,www.zr-kuka.com,图源:勃肯特机器人
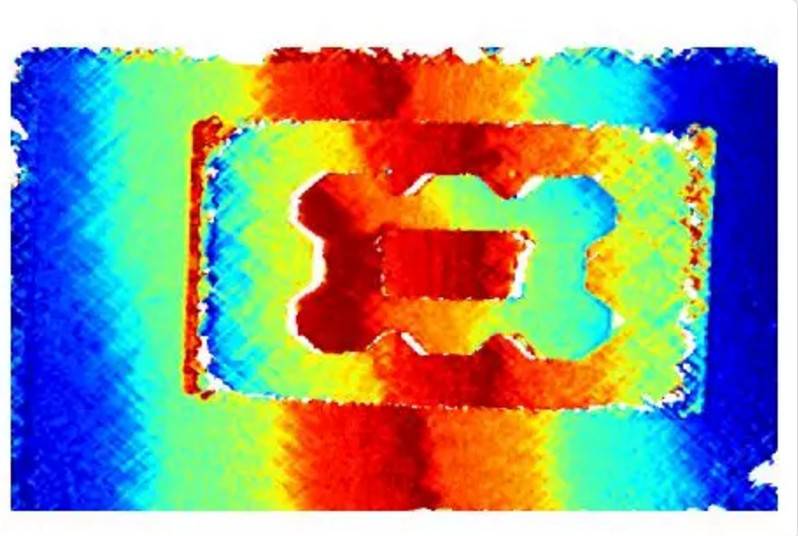
相机采集的深度图像,图源:勃肯特机器人
感谢勃肯特机器人提供的以上案例内容。勃肯特机器人研究院团队成立于2019年3月份,成员平均年龄26岁,其中硕士占比超过一半,在内部有“最高智商”团队之称。先后成功主导及参与完成“异型烟智能分拣码垛项目”、“并联6轴Stewart平台”、“镇江工厂智能信息化管理系统”、“统筹分拣”、“BeMotion 控制器”多个项目的算法研发。随着该项技术项目的成功落地,可以预见的是,勃肯特将凭借自己的“眼睛”配合串并混联六轴机器人不断探索客户的实际应用领域,提供更多高精度的解决处理方案,练就更符合客户需求的“金睛火眼”。