



2019年6月,工业机器人维修,勃肯特正式发布第一款“双臂结构”的并联机器人——Phantom(幻影)-1200,也同时将并联机器人“双臂结构”概念首次带入到并联机器人产品中,从此,勃肯特进入了并联机器人结构全新升级阶段。
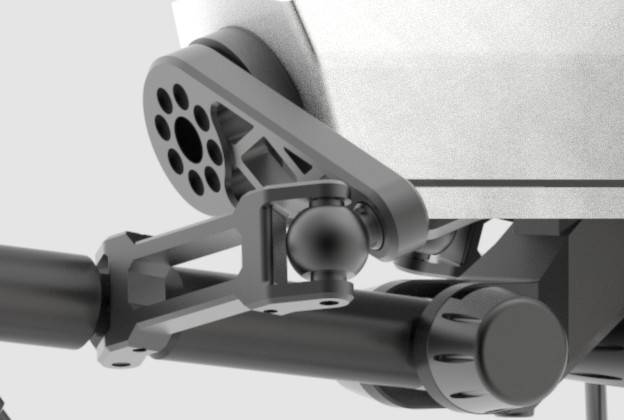
“双臂结构”顾名思义,是将机器人的主动输出臂和主副动臂铰接,主动副臂和从动主臂铰接从而共同构成了主动臂组件。这样的结构可以通过间接驱动主动臂的方式达到主动臂惯量降低从而提升运行速度的效果。
历时5个月,勃肯特将“双臂结构”再次进化,新款“双臂结构”并联机器人Wraith(魅影)-1200闪耀登场。
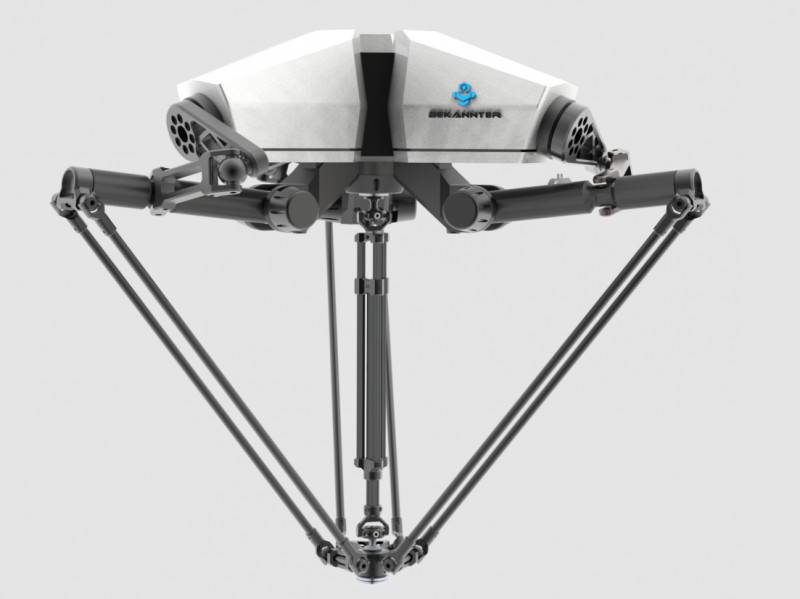
Wraith(魅影)-1200采用凸轮式并联结构,其优势在于能有效消除行星减速机回差对机器人末端精度影响,同时机器人末端在往复运动过程中由于凸轮结构的特性使得电机输出同向且速度波动大幅减小,从而达到高效率低能耗的优点
新款机器人与Phantom-1200相同的是,为了避免电机在高速运转下温升过快而导致电机报警无法持续高速运行的问题,设计并安装机械式扭簧能量回收系统,该系统可以既保证发挥出电机的最佳性能,又能保证机器人高速、平稳地持续运行。

随着各大生产厂商的要求不断提高,产量不断加大,设备投入成本也随之达到新的高度,降低成本提高效率将成为各大厂商追逐的要点,并联机器人一直以“高速度”为优势,传统并联机器人的结构可以让并联机器人的标准节拍达到400次/分钟以上的速度(勃肯特Polyhedron-1200系列),但双臂结构的Phantom(幻影)-1200的标准节拍已突破500次/分钟,未来,Wraith(魅影)-1200同样会将并联机器人的优势继续提高到一个前所未有的新高峰:除了保证并联机器人的高速优势外,库卡机器人何服电机维修,Wraith(魅影)-1200将采用直驱电机,在进一步提高机器人精度的同时,降低使用能耗,成为减少成本最佳方式。
勃肯特致力于将产品做到极致,从并联两轴机器人到并联三加一轴机器人,再到并联全产品线,库卡机器人驱动器维修,不断突破技术壁垒,对产品性能要求苛刻,力求完美,掀起一场属勃肯特的“高效低耗风暴”。