
- 什么是有效负载?如何控制您的库卡机器人?
- KUKA库卡机械手KR360维修保养技巧分享
- 维修保养|库卡KUKA机器人KR 210维修保养经验丰富
- 库卡KUKA机器人维修保养小手册
- 维修保养|KUKA库卡机器人维修保养干货知识



华为:2025年14%家庭将拥有“机器人管家”
华为于8月8日发布全球产业展望GIV@2025,提出智能世界正在加速而来,触手可及,并预测:到2025年,智能技术将渗透到每个人、每个家庭、每个组织,全球58%的人口将能享有5G网络,14%的家庭拥有“机器人管家”,97%的大企业采用AI。
笔者从事服务机器人研发工作,所以对该行业有一定的了解。当今天看到华为发布2025年十大预测的内容时,第一时间在部门内进行了分享,给了小伙伴们极大的鼓舞。由于工业机器人和服务机器人有比较大的差异,所以本文仅对服务机器人进行解读。
十大预测:机器人占比达20%
十大预测中,其中关于机器人的预测占比达到20%:
趋势一:是机器,更是家人
随着材料科学、感知人工智能以及5G、云等网络技术的不断进步,将出现护理机器人、仿生机器人、社交机器人、管家机器人等形态丰富的机器人,涌现在家政、教育、健康服务业,带给人类新的生活方式。
GIV预测:2025年,全球14%的家庭将拥有自己的机器人管家。
趋势二:超级视野
以5G、AR/VR、机器学习等新技术使能的超级视野,将帮助我们突破空间、表象、时间的局限,见所未见,赋予人类新的能力。
GIV预测:2025年,采用VR/AR技术的企业将增长到10%。
趋势三:零搜索
受益于人工智能及物联网技术,智能世界将简化搜索行为和搜索按钮,带给人类更为便捷的生活体验:从过去的你找信息,到信息主动找到你;未来,不需要通过点击按钮来表达你的需求,桌椅、家电、汽车将与你对话。
GIV 预测:2025年,智能个人终端助理将覆盖90%的人口。
趋势四:懂“我”道路
智能交通系统将把行人、驾驶员、车辆和道路连接到统一的动态网络中,并能更有效地规划道路资源,缩短应急响应时间,让零拥堵的交通、虚拟应急车道的规划成为可能。
GIV预测:2025年,C-V2X(Cellular Vehicle-to-Everything)蜂窝车联网技术将嵌入到全球15%的车辆。
趋势六:人机协创
以人工智能、云计算等技术的融合应用,将大幅度促进未来创新型社会的发展:试错型创新的成本得以降低;原创、求真的职业精神得以保障;人类的作品也因机器辅助得以丰富。
GIV预测:2025年,97%的大企业将采用AI。
趋势八:共生经济
无论身在何处、语言是否相通、文化是否相似,数字技术与智能能力逐渐以平台模式被世界各行各业广泛应用。各国企业都有机会在开放合作中,共享全球生态资源,共创高价值的智能商业模式。
GIV 预测:2025年,全球所有企业都将使用云技术,而基于云技术的应用使用率将达到85%。
趋势九:5G,加速而来
大带宽、低时延、广联接的需求正在驱动5G的加速商用,将渗透到各行各业,并比我们想象中更快地到来。
GIV预测:2025年,全球将部署650万5G基站,服务于28亿用户,58%的人口将享有5G服务。
趋势十:全球数字治理
触及智能世界,遇到了新的阻力和挑战。华为呼吁全球应该加快建立统一的数据标准、数据使用原则;并鼓励推动建设第三方数据监管机构,让隐私、安全与道德的遵从,有法可依。
GIV预测:2025年,全球年存储数据量将高达180ZB。
机器人涉及的技术
对于服务机器人,涉及到三个核心问题:
1.我在哪里?
2.我要去哪里?
3.我怎么去?
针对以上三个问题,业界提出了不少的解决方案,如SLAM(即时定位与地图构建)和VSLAM(视觉-即时定位与地图构建)。根据对上面三个问题的回答,不难总结出机器人的基本功能,如下图所示:

为了提高机器人设计和开发的效率,美国斯坦福大学的人工智能实验室开源了一套机器人开发套件Robot Operating System,缩写为ROS。ROS的系统架构是由摩根·奎格利(Morgan Quigley)设计,他当时还是美国斯坦福大学博士生,他的博士导师是中国知名度非常高的吴恩达(Andrew Ng)。
ROS由核心通信机制、开发工具、应用功能和生态系统四部分组成。目前有ROS和ROS2两个版本,其系统架构区别为:
为了提高机器人设计和开发的效率,美国斯坦福大学的人工智能实验室开源了一套机器人开发套件Robot Operating System,缩写为ROS。ROS的系统架构是由摩根·奎格利(Morgan Quigley)设计,他当时还是美国斯坦福大学博士生,他的博士导师是中国知名度非常高的吴恩达(Andrew Ng)。
ROS由核心通信机制、开发工具、应用功能和生态系统四部分组成。目前有ROS和ROS2两个版本,其系统架构区别为:为了提高机器人设计和开发的效率,美国斯坦福大学的人工智能实验室开源了一套机器人开发套件Robot Operating System,缩写为ROS。ROS的系统架构是由摩根·奎格利(Morgan Quigley)设计,他当时还是美国斯坦福大学博士生,他的博士导师是中国知名度非常高的吴恩达(Andrew Ng)。
ROS由核心通信机制、开发工具、应用功能和生态系统四部分组成。目前有ROS和ROS2两个版本,其系统架构区别为:
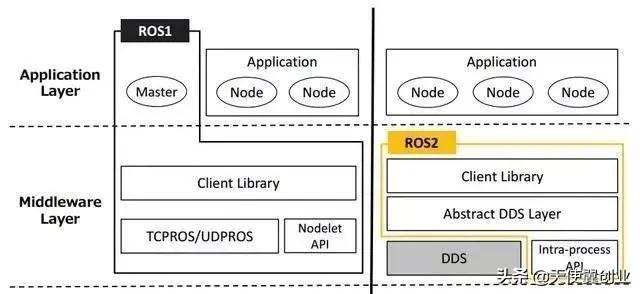
两者主要的区别在于通信机制的变化。ROS2采用了DDS机制,解决了ROS实时性的缺陷,因为这个缺陷很严重,以至于被诟病很久。