



虽然夏天都过去了这么久,但谁能想到小编竟然还能深受蚊子的骚扰~~这只蚊子真的是很强啊,为了消灭这些蚊子,小编特意进口了一款专用的“拍蚊子机器人”
经过小编亲自测试,这款机器人拍蚊子效果非常不错,不到半天,残留的蚊子都被消灭殆尽,小编表示五星好评
当然,以上故事情节纯属虚构啦,能买得起它拍蚊子的想必是土豪无疑了!
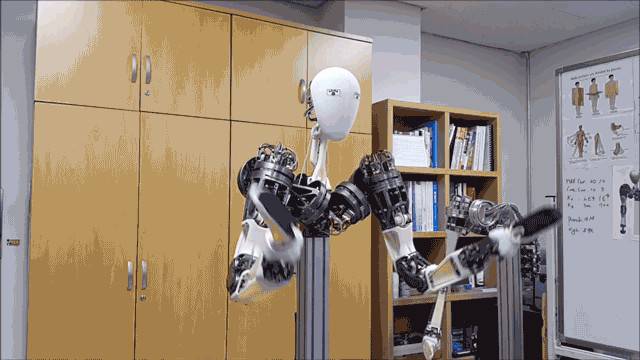
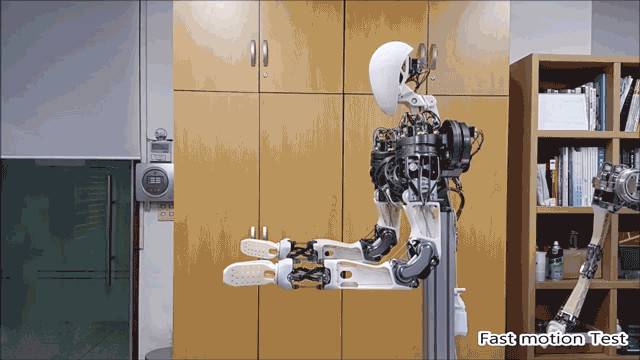
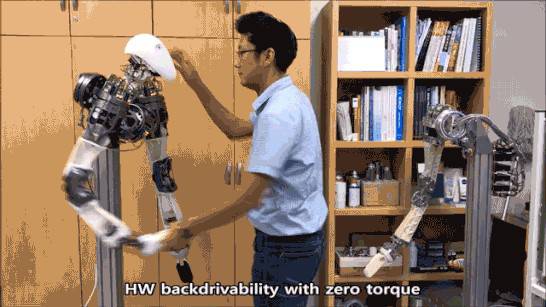
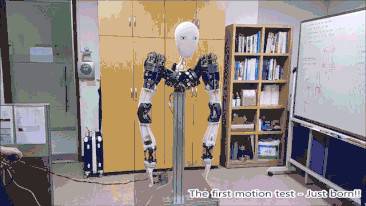
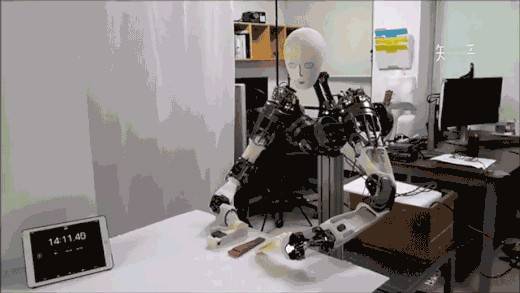
这款机器人是由韩国KoreaTech开发的一款基于肌腱驱动技术的双臂机器人名字叫做LIMS2-AMBIDEX,在今年的2018 IROS(国际智能机器人与系统大会)上,凭借其手速和流畅的动作成功地吸引了大家的眼球。
“钢铁肌腱”
小编第一次看到LIMS2-AMBIDEX时,第一感觉就是动作和谐,要是给它安上下半身,就能以百米冲刺的速度冲出画框~~
或者给它一把菜刀,这手速感觉可以不间断切肉丝儿,当一个妥妥的厨子。
那么LIMS2-AMBIDEX为什么这么快呢?
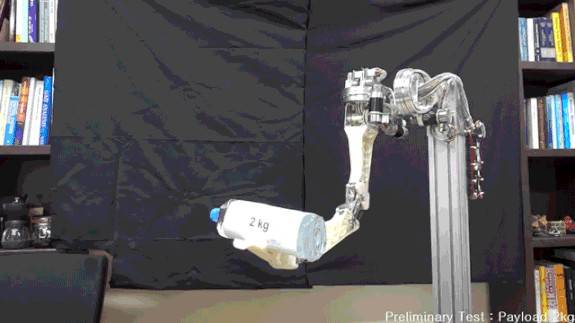
这一切都要得益于LIMS2-AMBIDEX的设计。一个大榔头是很难挥动的,为此设计人员将整个机器人的驱动器都集中到了机器人的肩部,质量大致分布是单臂重量为6.8Kg,其中肩关节4.17Kg,其它关节2.63Kg**
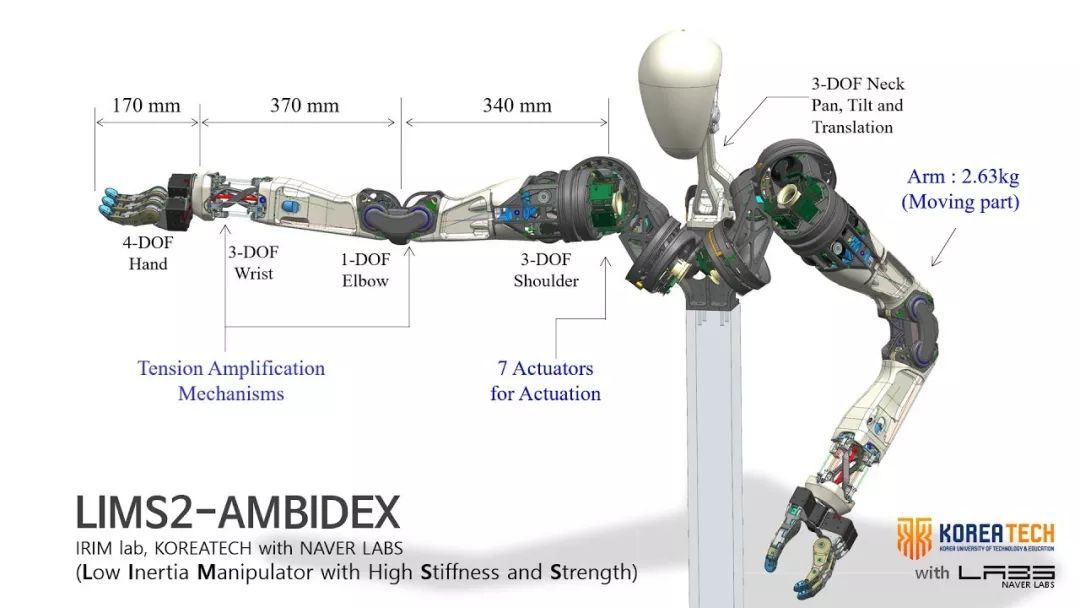
这样较好的减小了机械臂末端执行器的惯量,原本拿来挥动榔头的劲儿拿来挥舞棍子,怎么能不快?
只是电机都在肩部,使得手臂上不能容纳独立的电机,如何驱动手臂运动呢?
为了驱动手臂,设计人员采用了肌腱驱动(Tendon-driven)的设计方式,这项设计通过使用“线”和塑料等来材料模仿肌肉和肌腱实现对生物体四肢的仿生,其中的“线”就是一切运动的源头,就像木偶一样借助细线一样。通常由这种技术驱动的机器人比使用由齿轮传动器控制的刚性金属或塑料肢体的传统机器人运动的更加自然,也越接近与生物运动的原理。
接下来我们就一起了解各个部分的设计吧。
肩部驱动器
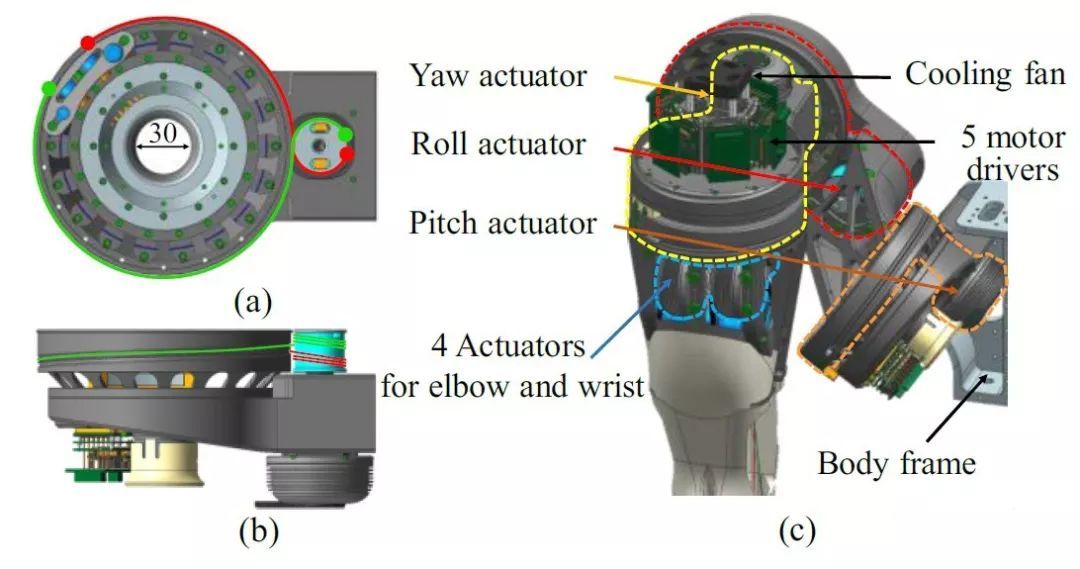
肩部总共包括7个驱动器,橙红黄区域分别为驱动肩关节的3个驱动器,蓝色区域则集成了手肘和手腕关节的4个驱动器,这样整个手臂的驱动器都排布在了肩关节,库卡机器人驱动器维修,工业机器人维修,接下来就是通过传动系统将驱动力传送出去。
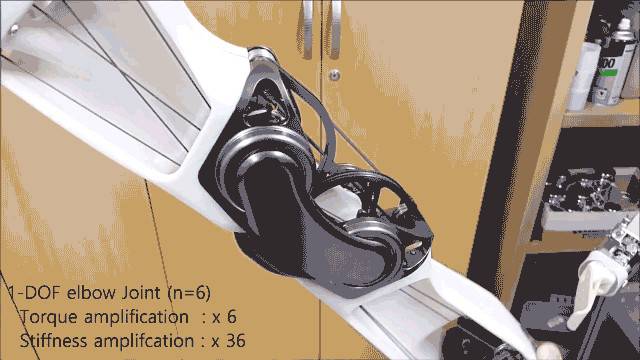
手肘部分的传动结构
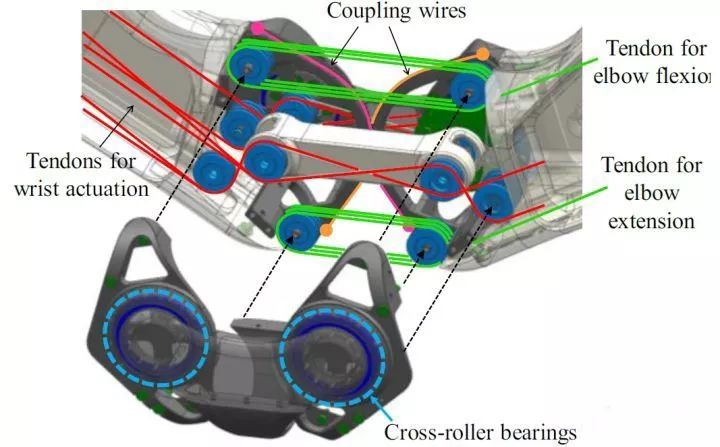
手肘部分只有一个俯仰自由度,通过”肌腱“(线)在肩部驱动器的驱动器的驱动下实现俯仰运动
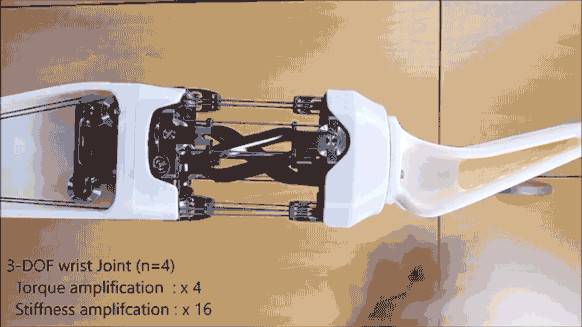
手腕部分的传动机构
为了使得机器人的手腕灵活转动,LIMS2-AMBIDEX还设计了一个小巧的构件,通过这个构件可以使得整个机械臂在各个方向自由活动
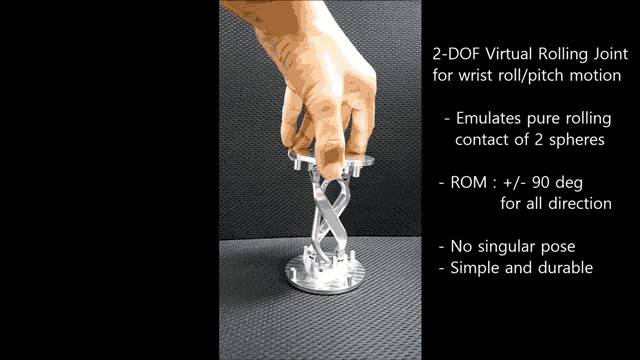
最后一个灵活的手腕就出现了~
你能干个啥
经过这一些列的设计,整个手臂是极其"柔软顺滑"的,经过暴力测试,手感真的很不错
不过乍一看,库卡机器人,LIMS2-AMBIDEX现在除了把手瞎挥来挥去,还会干个啥???
也许当个交警?在十字路口中央指挥交通~~
抑或是搬砖??
来煽个风??
未来LIMS2-AMBIDEX会有什么正经的职业呢???难不成真的要去拍蚊子?或许应该先给它装个腿~~~
注:本文部分参考自知乎用户 任赜宇:2018IROS,这款来自韩国的双臂机器人不容小觑。