



随着我国经济的迅速崛起,作为国民经济的第二大支柱产业,食品工业的现代化水平已成为反映人民生活质量高低及国家发展程度的重要标志。食品加工领域的快速发展,给企业带来极大的挑战,随着消费水平的提高、消费渠道的增多,越来越多消费者更加关注食品的品质和多样性。因此,从传统的手工劳动和作坊式操作中解脱出来,实现食品生产的机械化、自动化、专业化和规模化,提高卫生安全和生产效率,是企业在激烈的市场竞争中健康长久发展下去的重要转变。
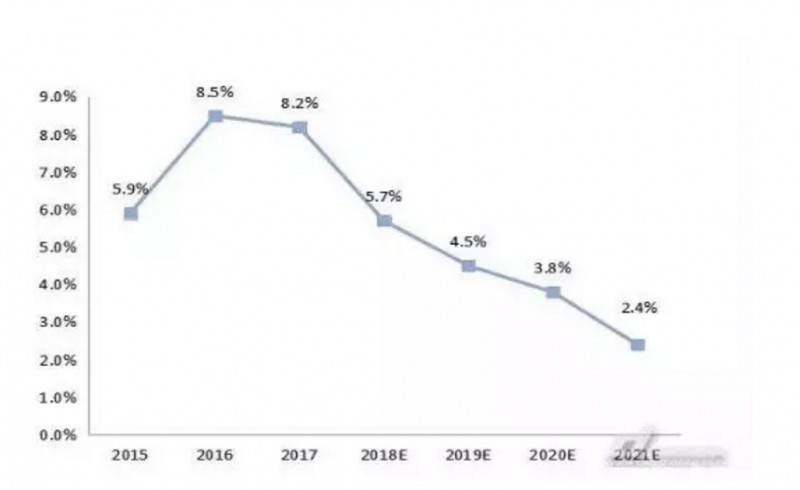
2015年-2021年食品饮料行业投资规模及预测(单位:百亿人民币)
目前,食品行业在原料加工环节的非标设备让前端自动化程度基本完善,在末端包装环节,由于产品个性化、多样化成为市场需求趋势,非标设备整线固定生产的模式已无法满足生产的柔性化需求。近年来,并联机器人因其占地面积小,速度节拍快,柔性化高的特点在食品末端包装的装箱/装托、分拣、理料、转线等工艺上大量应用。

勃肯特根据客户实际需求,在本体臂展范围方面,实现活动直径从400mm~2600mm全覆盖;在节拍速度方面,以提升客户生产效率为出发点,不断优化本体,最新研发的本体Phantom-1200,速度节拍达到500次/min。勃肯特对食品行业的长期关注,结合客户实际需求,给大家分享以下相关应用案例。
多品类巧克力,并联机器人柔性化装托
巧克力装托大多依然依靠人工和自动装盒机进行操作,人工操作具备一定柔性化,但长时间操作,无法保证生产效率的稳定性。自动装盒机效率稳定,但无法满足产线品类的多样化需求。为此,勃肯特提供的柔性化解决方案,不仅提升生产效率,而且实现了多品类产品同一条产线,减少换线,直接降低产线成本,为客户生产省时省地,提升效益的同时实现创收。
产线来料为3种不同形状和颜色的巧克力,分列摆放在托盘中,其中同种形状同种颜色为一列,来料经视觉系统进行定位、识别后,机器人根据信息快速抓取后放置在托盘对应位置,工业机器人维修,拾放节拍为68个/分钟,为保证食品安全,机器人末端特别配备食品级抓手,操作过程卫生、安全。
(巧克力装托视频)
大批量生产,统筹分配智能化操控
末端包装环节,由于产品数量庞大,工业机器人维修,需要多台机器人协作工作时,机器人之间的“配合默契”,显得格外重要。勃肯特研发的基于视觉的多机器人任务分配算法,使用视觉系统通过局部观察获取环境信息,由状态转移方程选择任务执行,实现从局部到全局的针对多机器人系统的协调分配。

当统筹分配系统中相互协作的某台机器人发生故障后,任务分配算法会将该机器人的任务自动分配至其他正常机器人的抓取任务中,以保障正常的抓取效率,当故障机器人恢复正常后,其他机器人会将任务自动分配回原故障机器人以继续进行抓取任务;
当视觉检测到来料过于密集时,统筹分配系统会自动降低传送带速度,保证机器人的正常抓取效率,当视觉检测来料过于稀疏时,传送带速度则会自动提高,以达到抓取要求。统筹分配所搭载的BeMotion运动控制器,支持Scara/Delta/Stewart平台/串联六轴等机器人模型,因此,可广泛应用于多种应用场景。
(统筹分配视频)
近年随着人口红利的消失,劳动力以及能源等生产要素价格持续上升,企业为稳定生产成本、提高生产效率,机器人维修,自动化生产已是不可逆转的大趋势。勃肯特“想客户之所想”,以技术研发为先导,不断探索机器人结构、控制和视觉算法的优化与创新方案,为更多客户提供优质的服务。