



一、先在S7 软件中创建出机器人用PROFIBUS 卡的.ldb 文件cp5614.ldb ,同时将该卡的GSD 文件cp5614.gsd 一起复制到机器人的C\KRC\Roboter\Init 子目录内。(如何创建.ldb 文件见后面)
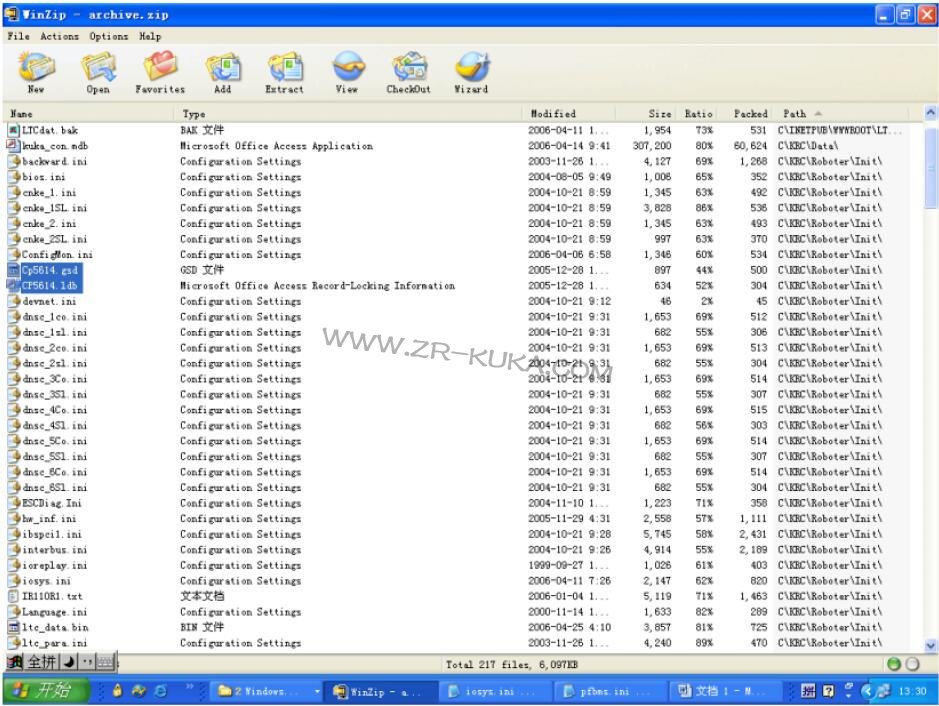
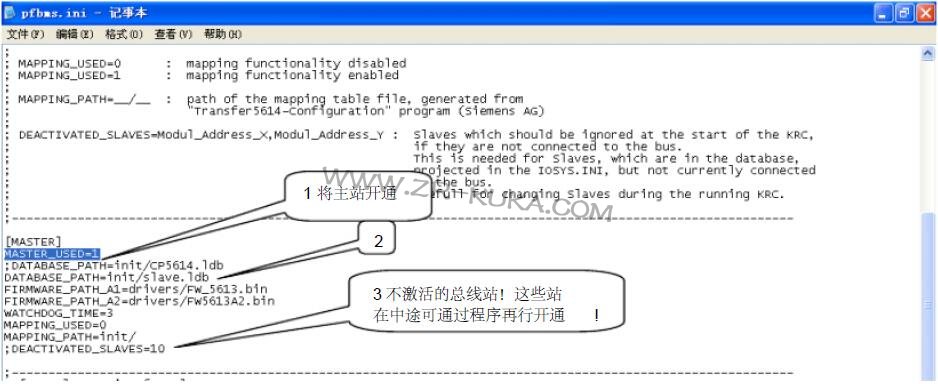
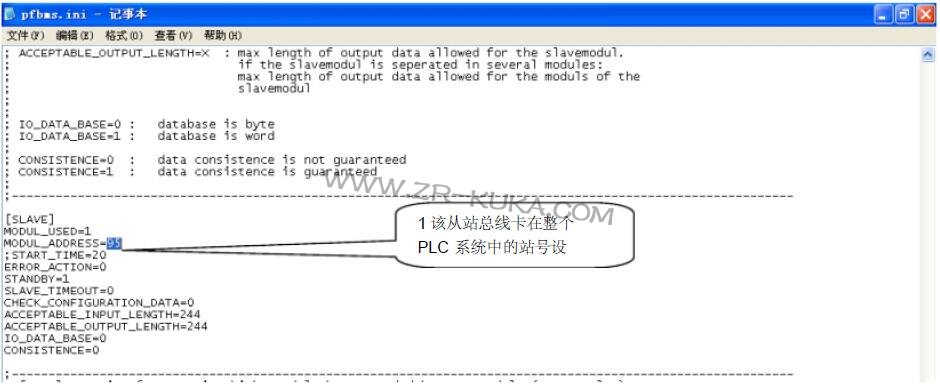
二、将C\KRC\Roboter\Init 文件夹内的pfbms.ini 文件打开,并设置相应参数。
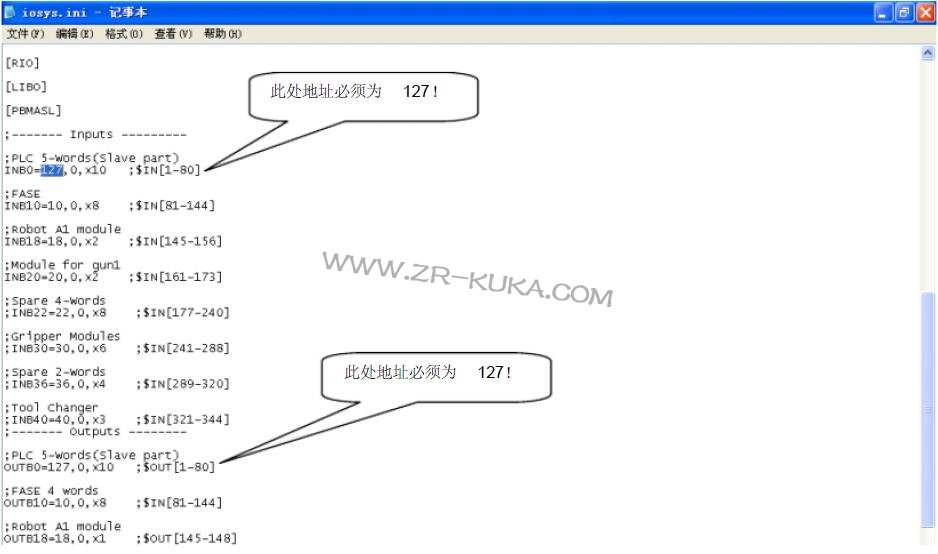
三、在C\KRC\Roboter\Init 文件夹的iosys.ini 文件的该行开通,并设置输入输出地址!

创建。ldb 文件的步骤
1、在S7 的硬件配置中,找到CP5614A2 卡,并拖入配置框;
2、找到Application 中的SWV6.3 ,并拖入CP5614A2 的下一行配置框;
3、双击配置框中的CP5614A2 ,在对话框中选中operation mode 这个下拉菜单,选中“ DP maser”,在DP mode项选中“ DPV1 ”,在Assigned application 中选中“ application ”,并打“√”选中“ create ldb file ”;
4、“保存”。