EtherCAT是EtherCATTechnologyGroup公司一种以以太网为基础的开放式
现场总线系统。
KRC4配置EtherCAT输入输出模块

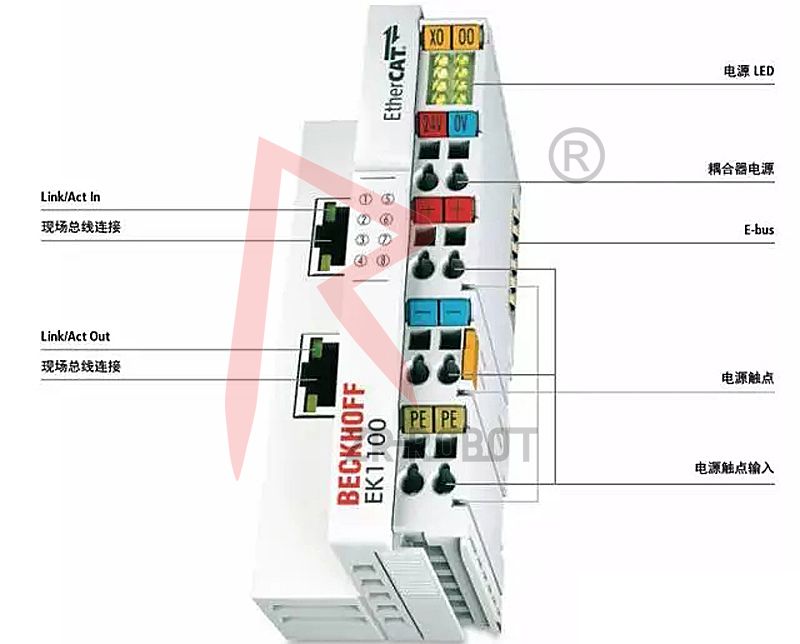
一、硬件Hardware
二、软件Software
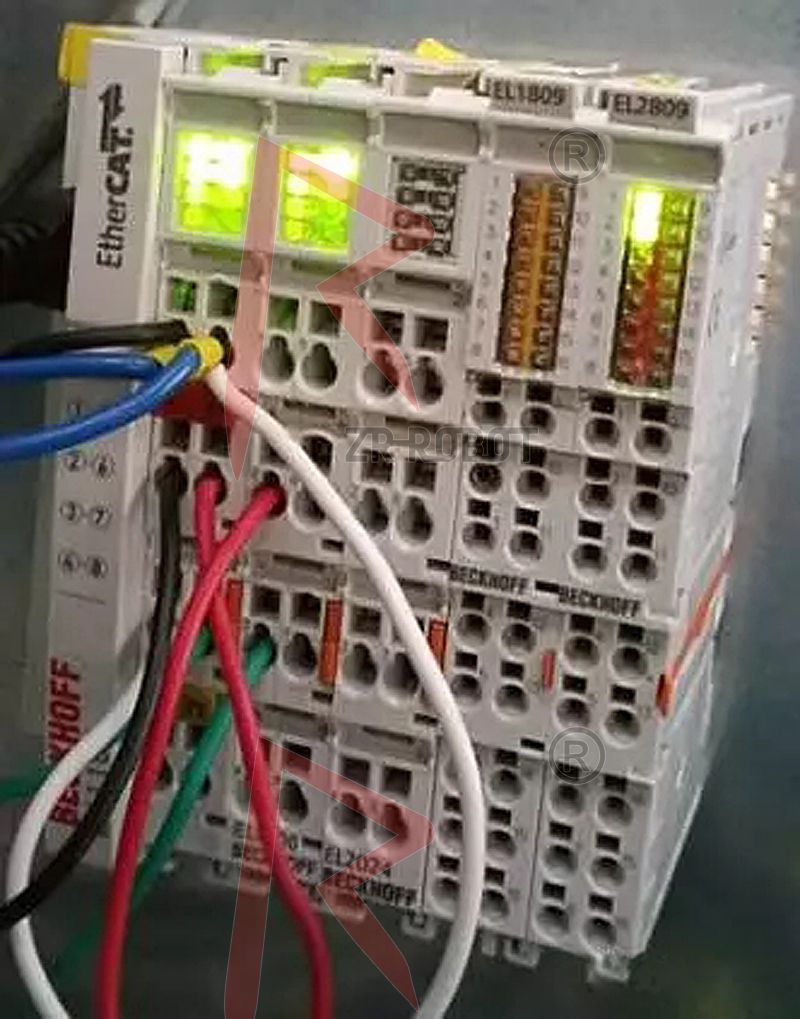
三、硬件连接Connection
参照电气图纸将硬件连接。
四、WorkVisual配置Configration
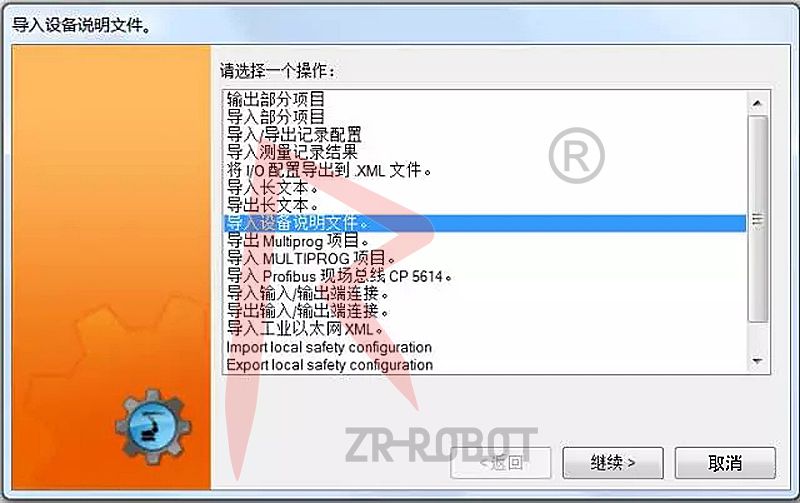
1.导入设备描述文件
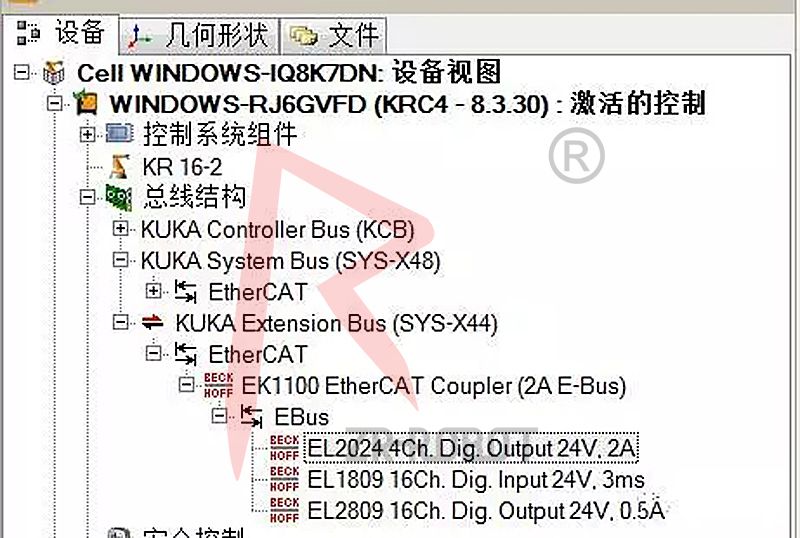
参见Workvisual。这里需要导入EL1XXX和EL2XXX两个文件。对应输入模块EL1809、输出模块EL2024/EL2809。
注:根据模块的具体型号添加相应的devicedescription文件。

2.具体步骤:
打开Workvisual,菜单File---Import/Export---Importdevicedescriptionfile---选择文件类型ESI,选择导入,devicedescription导入完成。
3.总线模块的配置
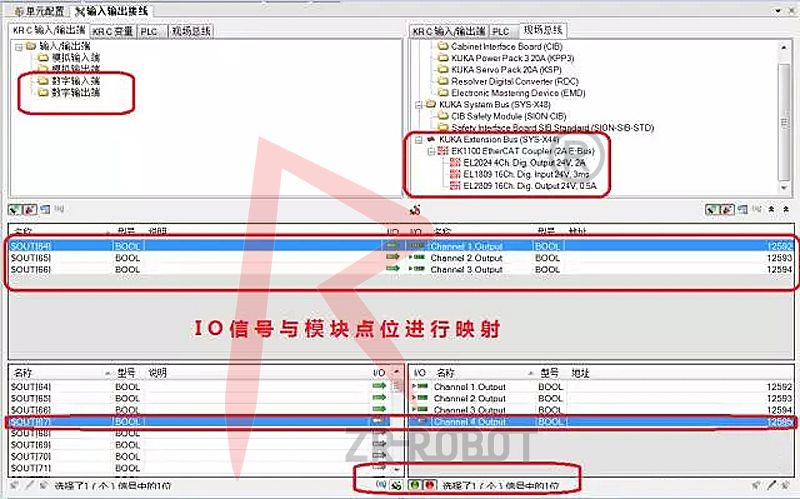
五、输入输出映射配置IOMapping
根据电气设计及电气信号的规划进行信号映射,在IOMAPPING窗口进行相应信号ID的IO映射。具体过程如下图所示。
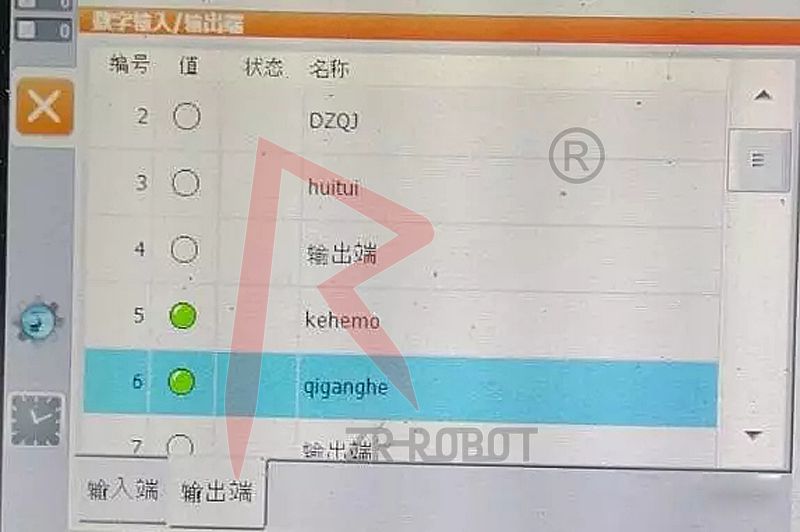
六、项目配置安装ConfigurationDeployment
配置完成后,Deploy到KRC4控制器。注意观察SmartPAD上的消息以及模块的指示灯,并通过数字输出端强制输出信号,观察EL2809模块上的信号指示灯是否与10地址对应,确认模块通讯正常,配置正确!